
怎么评价一台多旋翼飞行器是否是合格的无人机呢?就像一辆合格的汽车必须有车身稳定控制、安全带、安全气囊、ABS 防抱死装置等安全措施一样,多旋翼飞行器也必须有惯性测量元件、GPS、视觉里程计、避障系统、气压计和超声波等传感器构成的智能导航系统才能称为无人机。接下来就向大家讲解多旋翼传感器发展背后的逻辑,让大家知道一台合格的无人机背后的故事。
背景知识
十五个测量状态
多旋翼飞行器想要在三维世界稳定飞行,首先最基础的问题是要确定自己在空间中的位置和姿态。测量位置和姿态需要不同的传感器,例如飞行器的三维位置可由GNSS 卫星导航系统获取。
多旋翼飞行器在空中飞行的时候,只知道三维位置还不够。多旋翼飞行器是通过调整自己的“姿态”,来产生往某个方向的推力完成飞行动作。比如说往侧面飞实际上就是往侧面倾,此时飞行器的一部分升力会推着飞行器往侧面移动。为了能够调整自己的姿态,就必须测量自己的姿态。姿态用三个角度表示,也是三维的。此外测量位置实时变化也需要知道三维的速度和加速度。
多旋翼飞行器要确定自己在空间中的位置和姿态,就要测量自己的三维速度、三维加速度和三维角速度,一共是十五个状态量。多旋翼传感器技术的发展,就是围绕如何准确测量这十五个状态量展开的。
第一代飞控技术
组合导航技术
准确测量十五个状态量是多旋翼飞行器做任何动作的基础中的基础,但是现在的科技水平还没有能够实现让一个传感器同时测量这么多的物理量。几十年来,人们发展出了一套复杂的技术,用 GNSS加上惯性测量元件、气压计和地磁指南针形成组合导航来测量十五个状态量。
名词解释:
GNSS 全球卫星导航系统,他的作用是测量经度、纬度和高度;地磁指南针,他的作用测量航向。
 GNSS 天线及地磁指南针
GNSS 天线及地磁指南针
惯性测量元件,他的作用是测量自身的三维加速度和三维角速度。气压计,他的作用是测量海拔高度。
 惯性测量元件及气压计
惯性测量元件及气压计
传感器互补原理
GNSS、惯性测量元件、地磁指南针和气压计都有各自的优缺点,导致无法准确测量飞行器的状态量。通过使用电子信号处理领域的技术,融合多种传感器的测量值,可以较为准确地测量飞行器十五个状态量。
例如惯性测量元件的测量容易发散,这个发散可通过 GNSS 来抑制。GNSS 可获得三维位置也可获得三维速度。惯性测量元件可获得三维加速度,加速度的积分也是速度。在通过地磁指南针获得航向的基础上,两种速度的观测就可融合。通过 GNSS 的测量值来发现并抑制惯性测量元件的发散,就能更准地测量三维角度和三维加速度。因此 GNSS 和惯性测量元件可互相取长补短,提高测量的准确性。
大疆在上述的技术基础上进行了自主研发,并于 2007 年推出大疆第一代飞控产品 XP2.0。并后续推出了面向多旋翼飞行器的飞控产品,例如悟空、哪吒等。大疆的飞控产品凭借质优价廉的特点,一举占领了世界多旋翼飞控市场,也奠定了日后全球引领者的地位。
 Wookong-M 飞控
Wookong-M 飞控
但是有的传感器无法通过互补的方式弥补它的缺点,例如 GNSS 信号只有在开阔的空间内才能给出比较好的测量值。因为 GNSS 接收机需要从天上的卫星获得信号,要求接收机和卫星之间的连线上没有遮挡。一旦有建筑甚至是树木的遮挡,卫星发下来的信号就有噪声,GNSS 接收机就不能给出很好的位置和速度观测。在室内环境中,GNSS 甚至完全不能使用。组合导航技术要想进一步发展,就需要寻找其他能够在 GNSS 不能使用的环境中,使用的传感器来弥补它的缺点。
视觉感知系统
1970 年之后,随着数字成像技术的发展,相机作为一种传感器开始被广泛研究。相机的原理模拟人的双眼,因为人可以通过自己的视觉估计视野中物体的位置和距离,所以研究者们模仿人的特点,可以利用相机的二维图像反推图像中物体的三维信息。这种由二维图像推算三维信息的技术和数学理论发展成一个独立的学科叫做计算机视觉,也被称作机器视觉。
 视觉感知系统
视觉感知系统
视觉感知系统由一个或者多个相机构成,理论上能够单凭相机就可以准确测量十五个状态量。但是与其他传感器类似,相机也有很多的缺陷,包括无法恢复尺度、成像质量有限、计算量消耗巨大等等。幸好,我们还可以把视觉感知系统和其他传感器结合起来,例如与组合导航技术结合互相提高测量精度。
第二代飞控技术
光流测速模块
光流测速模块通常由一个相机、一个惯性测量元件、一个超声波模块构成。采用计算机视觉技术中于 1981 年被发展出来的“光流追踪”算法,其作用是测速度。光流算法原理上只可以测三维速度,不能直接测量三维位置。我们可以通过光流测速模块测出的三维速度,在通过积分获得三维位置,但是就像惯性测量元件积分会发散一样,光流测速模块积分得到的位置也会发散,好在它不会天马行空地失去控制。光流测速模块和组合导航技术中除了GNSS之外的传感器妥善融合之后,它可以做到悬停时测量的位置不发散。因此光流测速模块可在有限的条件下能够替代 GNSS。
大疆在 2014 年底推出的第二代飞控的相关产品中加入了光流测速模块,同时也加入了SDK、限飞区和新手模式等功能。例如大疆“悟” Inspire 1 以及精灵 Phantom 3 上都装载了自主研发的光流测速模块。
 大疆精灵 Phantom 3 的光流模块
大疆精灵 Phantom 3 的光流模块
第三代飞控技术
双目立体视觉系统
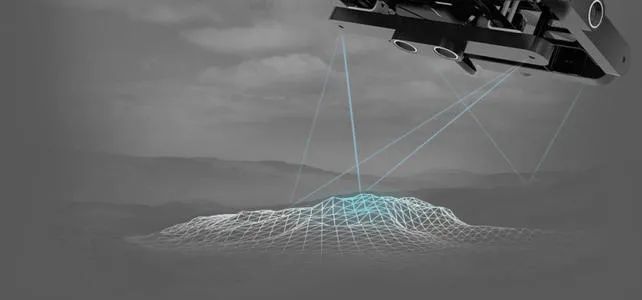
双目立体视觉系统由两个相机构成,类似人眼结构。采用视觉里程计的技术,通过对同时出现在左右两个相机视野的视差解算物体的位置,并结合惯性测量元件实现自身状态观测。
2004 年,NASA 成功把视觉里程计和惯性测量元件构成的视觉定位系统装在“机遇号”和“勇气号”火星车主频仅有 20MHz 的特制芯片上,送上了火星。帮助火星车通过一对双目相机非常准确地记录自己走过的路线。此举吸引了很多计算机视觉研究人员投身视觉里程计的研究,极大推动了视觉里程计在机器人学中的应用。
 嫦娥四号
嫦娥四号
图片来源于 中国航天科技集团 公号
大疆精灵 Phantom 4 采用的双目立体视觉系统
大疆在精灵 Phantom 4 上实现了双目立体视觉系统加惯性测量元件构成的视觉里程计,飞机上装了两套双目立体视觉系统,一套向前看,一套向下看,一共是四个相机。
两套双目视觉还带来了视觉里程计之外的两个好处。
1、向下看的一套双目立体视觉系统可以探测下方地面上物体的三维位置,从而知道地面的距离。
2、向前看的一套双目立体视觉系统可以用来探测前方场景中物体的深度,产生深度图进行障碍感知。深度图还可以用于重建一个飞行器周围的局部地图,以进行精细的运动规划,这就是精灵4指点飞行的基础。

精灵 Phantom 4
除了增加视觉里程计之外,精灵 Phantom4 上还增加了超声波模块。所以精灵 Phantom 4上一共有 GNSS +惯性测量元件+气压计+地磁指南针+超声波模块+双目视觉系统六种传感器。其中双目视觉系统有两套,共四个相机;惯性测量元件有两个,实现双冗余备份;地磁指南针也有两个,同样双冗余。
 下视视觉
下视视觉
智能导航系统
有了这些传感器以后,组合导航系统升级成为了智能导航系统。智能导航技术极大拓展了飞行器可以活动的空间。当有 GNSS 的时候,系统可以通过 GNSS 为主进行十五个状态量的测量,此时视觉里程计依然可继续运作,提供额外的速度和位置的测量值,从而进一步提高精度;GNSS 信号不好的时候,视觉里程计可接替 GNSS 为整个系统提供稳定的观测。智能导航系统中有三种确定高度的传感器:超声波、气压计、双目立体视觉,这三种传感器几乎可以覆盖所有让传统多旋翼飞行器头疼的定高场景:树丛上方、室内、靠近建筑的位置、大风环境等等,从而让多旋翼飞行可以稳定飞行的场景大大增加。
地磁指南针的冗余设计,可很大程度上减小外部磁干扰带来的指南针故障。另外视觉里程计也能给出航向的观测,两者互补能够提高航向的观测精度。以前的飞行器上,因为地磁指南针受到干扰造成的问题比较多。而在精灵4上有了多重保护措施,地磁指南针被干扰导致问题的概率大大降低。
多旋翼飞控受体积及重量的限制,机载计算能力有限。但多个传感器的加入对芯片计算能力提出了严重考验,大疆为此投入了巨大的人力物力优化算法让传感器能稳定运行。而且每加入新的传感器必须和已有的组合导航系统在硬件和软件上深度融合,才能发挥作用。例如传感器与 GNSS 的无缝切换、室内掉高、急刹车时能否保持位置观测,这些都是考验是否能做到真正的融合。空有传感器但做不到深度融合,那传感器的作用会大打折扣,并且会引入新的风险。
智能导航系统带来的飞行体验的升级
对于航拍飞手来说,所有的花哨功能都不如悬停稳和飞行稳这几点重要,看简单的需求背后需要大量的技术支撑。比如在十几层楼的窗口把飞行器从室内飞到室外悬停,这种场景下,从窗口穿出时,向下看的传感器几乎马上全部失效,由于有建筑的遮挡,GNSS 也不会立刻生效,因此传感器系统不够稳健的飞行器有可能因为失去速度和位置的测量而飘到建筑上造成事故。
精灵 Phantom 4 则能够通过前视双目视觉系统的观测,在向下看的传感器都暂时失效时继续运行视觉里程计,及时提供辅助的速度和位置观测,避免造成无法控制速度和位置导致炸机的情况出现。
如何让飞行速度更稳,大疆在第二代飞控使用遥控器杆量转化成飞行器的加速度指令,而第三代的大疆飞控在精灵 Phantom 4 上变成了遥控器杆量转化成飞行器的速度指令。这看似简单的修改,却带来了飞行体验上的巨大升级。
在大疆精灵 Phantom 3 及前代飞行器或其他厂家无人机产品上,如果你推遥控器满杆前进,飞行器会以一个固定的角度加速飞出去,直到加速度被空气阻力抵消,这样控制并不直观,所以新手很难保持飞行器飞行速度稳定。
而在精灵 Phantom 4 上,如果推遥控器满杆前进,飞行器会自己调整到一个固定的速度上,直接操控速度显得非常直接、容易操控。以往,让飞行器保持匀速飞行是只有专业飞手才能做到的事情,现在则真真正正地让普通人也能触手可得。这一修改,不但提供了更好的操作手感,而且也显示了大疆对自己智能导航系统提供稳定的三维速度的测量信心。
总结
第一代飞控技术采用组合导航技术,通过 GNSS 加上惯性测量元件、气压计和地磁指南针来让飞行器测量自己的十五个状态量。
第二代飞控技术在第一代飞控技术的技术上加入光流测速模块,并支持 SDK、限飞区和新手模式等功能。
第三代飞控技术里加入了双目立体视觉、冗余传感器,支持避障功能和智能返航等功能。
技术不断的在发展,随着机载计算机算力不断强大;红外、毫米波雷达、激光雷达等多种传感器的加入;组合导航技术、计算机视觉技术、高精度定位技术、新一代通讯技术不断融合,大疆将不断完善及改进多旋翼传感器技术,为用户带来更可靠、更安全、更智能的无人机产品。








暂无评论