
本篇我们学习一些常用的电动机的位置、速度检测方法,有的通过电磁感应效应检测、有的通过光电转换后检测、有的通过霍尔元器件检测,等等。下面我们就一一来讲解。
1)光电编码器光电编码器可以把角度或者速度转换为数字信号输出,可以分为绝对式编码器、增量式编码器。我们先讲绝对式编码器,它由光电码盘和光电检测装置组成,如下图所示:
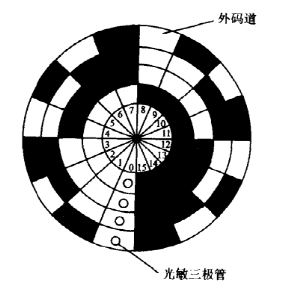
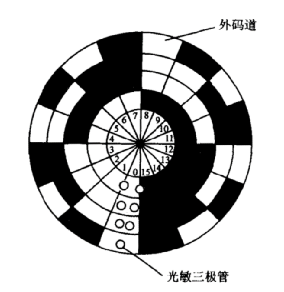
码盘与电机的转轴固定,可以随转子旋转;一列光电转换装置(光敏三级管)位置固定,可以检测到正对位置的黑/白状态。图中的码盘有4圈编码,是4位编码器。如果白色识别为0黑色识别为1,则图中位置4个光敏三极管的输出为0000;如果逆时针转动22.5°,则输出为0001。4位编码器一共可以表示16种状态,所以图示的编码器的分辨率为360°/16=22.5°。因为它的输出就指示了转盘的角度位置,所以称为绝对编码器。绝对编码器想要提高检测精度,需要提高编码的位数,也就是要增加码盘的圈数;但是不能无限增加,到了极限后,可以采用编码器级联的方式提高位数,也就是减速后再接一个编码器。绝对式编码器在检测位置时,如果正好停在两个扇区之间,光敏三极管可能把编码识别为0也可能识别为1,那么就很可能识别出错。有两种解决办法:一是使用格雷码设置码盘;二是多使用一组光敏三极管来检测,最外侧的码道上安装1只光电管,其他每个码道上安装两只光电管,一只为超前光电管,处于比它低一位的光电管超前的位置;一只为滞后光电管,处于比它低一位的光电管滞后的位置,如下图安装。最低位直接读取,i 1位的编码依据第i位的编码来取值,如果i位为1则取滞后光电管的读数,如果i位为0则取超前光电管上的读数。格雷码和超前/滞后法都可以使得误差与分辨率一致,最多跳一位。
现在讲讲增量式编码器,它的结构和绝对式编码器是差不多的,只是码盘上的编码不同。如下图,增量式编码器一般只有三圈编码,A、B编码等距离错开半个扇区宽度排列,C编码只有一点用于指示零位(有的增量式编码器没有C码道)。增量式编码器只能指示转盘的转动的相对角度和方向,不能指示绝对位置。
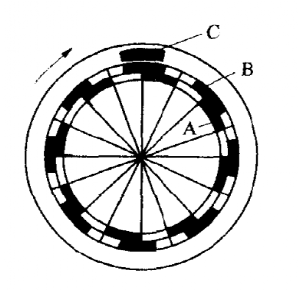
增量式编码器依据A、B码道的脉冲数来计算转过了多少角度。确定转动方向时,是依靠A、B编码的变化关系,如果在B编码为1时,A编码从1变为0,则码盘在顺时针转动时;如果在B编码为1时,A编码从0变为1,则码盘在逆时针转动。
2)电磁感应式传感器这类传感器是靠电磁感应原理来实现的。常见的一种电磁式传感器是开口变压器,结构示意如下图: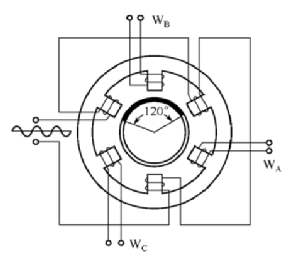
开口变压器的转子与电机转子相连,定子上有一块120°扇形的导磁材料,其他部分不导磁;定子上有6个齿,激励线圈绕在不相邻的三个绕组上,其他三个相隔120°的绕组上引出WA、WB、WC三个二次绕组。在工作时,激励绕组种通入高频的交流电(比转子转速高得多),由于中心的转子上,只有120°的范围能导磁(如图中的位置,只有WB绕组总可以检测到电压),所以通过检测WA、WB、WC三个绕组中的电压,就能知道转子的位置。实际中使用的扇形导磁片的角度不一定是120°,只要能分辨出位置即可;导磁片的个数应和电机的极对数相等。
除了开口变压器,还有一种常见的电磁感应式传感器是测速发电机,有直流或交流,也有单匝线圈或多匝线圈。它用转子带动一个小发电机,接上电阻作为负载后,检测电压,可以得知转子的转速。原理比较简单,就不细说了。
3)霍尔传感器霍尔传感器是用于检测磁场的器件。它是利用了霍尔效应,带电体在与磁力线垂直的方向运动时,会受到磁场的作用力(洛伦兹力)。霍尔器件安装方向与磁力线垂直时,会输出一个电压,并且这个电压是可以表示出磁力线的正反方向的。我们前面讲过无刷电机的有感驱动方式,就是使用三个霍尔器件去检测转子的位置,以实现换相。而实际上,由于霍尔的输出可以指示磁力线的方向,所以只需要两个成90°安装的霍尔器件,就能检测出转子的位置。如下图所示,由霍尔输出的正负可以知道N/S极的朝向,有两个霍尔输出电压的大小,可以知道磁铁的旋转角度: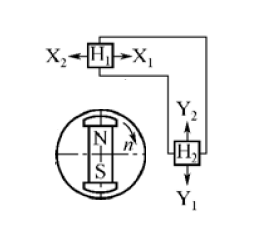
与霍尔器件相似的一种器件是干簧管,它也可以检测磁场,但是由于干簧管有机械触点,它的开关速度比霍尔慢的多;而且,干簧管只能检测磁场的有无,无法检测正负!所以在电机测速时一般不使用干簧管。
4)旋转变压器旋转变压器一般有相位检测式和跟踪方式两种。下图所示是“相位检测式“旋转变压器的基本结构,左边是定子线圈,中间是转子线圈,右边是转子输出变压器: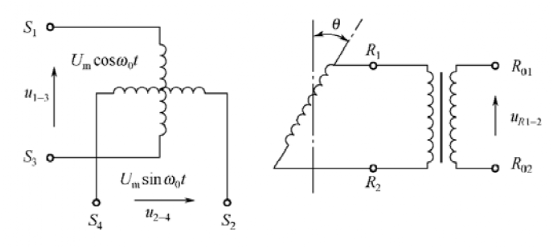
定子线圈有两个,在空间上相互正交,并且通上相位差为90°的正弦电流进行励磁,通常励磁电流频率远高于转速和工频。转子上有一个线圈,可以感应出定子线圈中的交变电流,并通过变压器输出。假设定子线中的电流为U1-3 = Um*cosω0t、U2-4 = Um*sinω0t,转子的角度位置为θ,则变压器的输出UR1-2 = k*(U1-3*cosθ – U2-4*sinθ) = k*Um*sin(ω0t-θ),其中k是变压器的比例。可以看到,转子的旋转角度就是输出信号相对于励磁信号的相移角θ,这样就能检测出转子的位置。(由于这种方法是用检测相位的方法来检测转子位置,所以称为相位检测式)继续上述的分析,如果转子正在以角速度ωr转动,那么上式可以化为:UR1-2 = k*Um*sin(ω0-ωr)t,也就说输出信号相对励磁信号的频率变化量,就是转子的转速。
旋转变压器的另一种实现方法,是跟踪方式,它的结构与相位检测式类似,但是定子只有一相线圈,而转子有两个正交的线圈,通过检测转子的两个线圈输出的电压幅值比,来确定转子的角度。
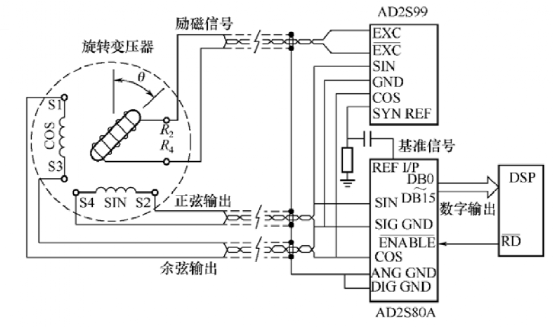
旋转变压器这种方式一般在高端设备中用的很多,主要是因为它输出的是模拟量信号,可以通过高位数的AD采集得到很高的分辨率。而相比与光电编码器等一些方式,如果想要做到高分辨率,成本会非常高。但是缺点是,旋转变压器方法使用时的计算量较大,需要有强大的处理器做支持,或者使用专用芯片。
如下图是一种专用芯片的实现方式:
好了,关于一些电机位置、速度的检测方法,就讲到这里了。








暂无评论