凡亿教育-大康
凡事用心,一起进步打开APP
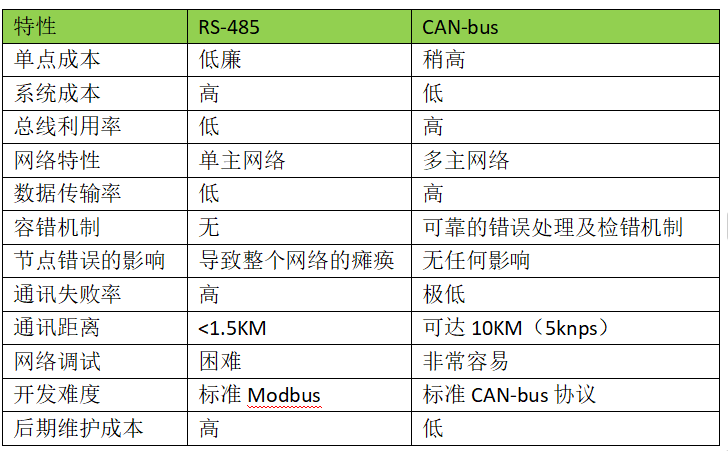
公司名片一图告诉你RS-485和CAN-bus的区别!
在总线系统中,RS-485和CAN-bus都属于使用频率较高的总线,各自有独特的特点及应用场景,被广泛应用。今天我们来谈谈它们的区别。
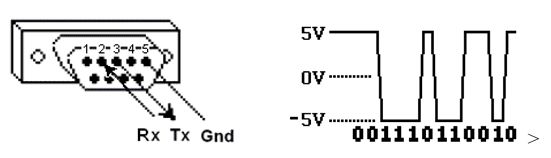
1、RS-485是什么?
RS-485是一种串行通信协议,自20世纪80年代中期以来一直存在,最初是为工业市场的应用而定义的。
它采用差分信号负逻辑,具有良好的抗噪声干扰能力,适用于强干扰的环境。
RS-485接口是平衡驱动器和差分接收器的组合,最大传输距离在理想环境下可达1200米,但实际使用中受多种因素影响可能较短。
它支持多点数据通信,采用半双工工作方式,即一次只能有一个设备可以传输数据,其他设备必须监听。
网络拓扑一般采用终端匹配的总线型结构,不支持环形或星型网络。
2、CAN-bus是什么?
CAN-bus,即控制器局域网总线技术,最初由德国Bosch公司为汽车应用而开发。
它是一种开放式、数字化、多点通信的底层控制网络,能有效支持分布式控制和实时控制。
CAN总线采用多主竞争式总线结构,每个节点都可以主动地向网络上其他节点发送信息,不分主次。
它具有高度的灵活性和实时性,支持无损总线仲裁技术,确保高优先级节点无延迟通信。
CAN总线还具备自动检测消息是否发送成功、自动重传等功能,传输可靠性极高。
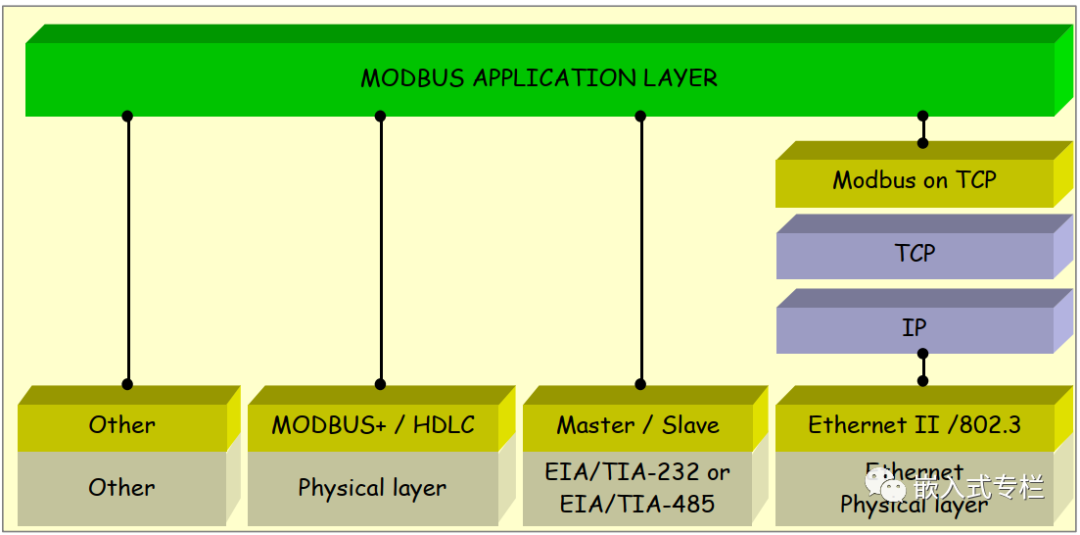
3、RS-485和CAN-bus的区别
本文凡亿教育原创文章,转载请注明来源!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表凡亿课堂立场。文章及其配图仅供工程师学习之用,如有内容图片侵权或者其他问题,请联系本站作侵删。
相关阅读
进入分区查看更多精彩内容>







暂无评论