
最近不是买了ADAQ7768-1了吗?我就算这个东西的极限性能怎么样,当然是在考虑到各种噪音的情况下。
先看一个考虑PSRR的情况: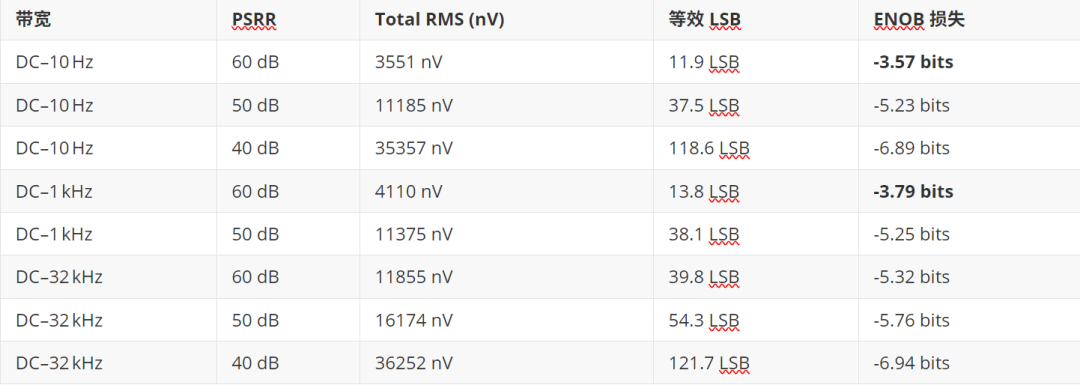
可以看到在这个带宽上来以后,ENOB损失的非常厉害,后面有些情况是完全不需要考虑使用高位的ADC的。即使我不考虑PSRR就纯电源噪音的情况情况下也是不太好看的数据。
1. 白噪声主导高带宽噪声
噪声密度为 65 nV/√Hz,随着带宽开阔,其占主导地位;DC–1.95 kHz 时,总噪声已近 3 μV RMS,超过 9.7 LSB,导致 ENOB 明显下降。
2. 低频段由基准源主导
ADR4550 的 0.1–10 Hz 噪声约为 **1.75 μVpp**,近似建模为带状低频白噪声,换算 RMS 为 0.505 μV;在 DC–10 Hz 时,该项成为主导贡献源,占据总噪声的约 87%。
假设系统目标为:
ENOB ≥ 21 bits
总噪声 ≤ 1 LSB (≈ 0.298 μV)
则:
只能在非常窄的带宽(≤3 Hz)下工作
这里吐槽一下,好多人写出来的信号链误差要求都是 ≤ 1 μV,这种的我一般都不会多搭理,ta根本不知道自己要的东西是什么情况。
说了这么多,我想聊一个话题,就是为什么精度和速度不能同时兼顾?
其实这是一个测量系统设计中的根本性权衡问题,本质上涉及噪声带宽积(Noise-Bandwidth Trade-off),无法通过单一手段同时提升速度和精度。
噪声与带宽成正比
白噪声密度为单位频率下的电压噪声(如 65 nV/√Hz),它在频域上是均匀分布的:
带宽越大,噪声越大,这是不可避免的积分规律。
精度 vs 速度 典型冲突如下:
如果追求 “DC–10 Hz” 的超低频测量 ➜ 可以获得 22–24 位有效位数;
如果要求 “DC–100 kHz” 高频测量 ➜ 实际只能使用 13–15 位有效精度。
若要兼顾:
高 ENOB: 请限制系统带宽、前端使用低噪声放大、滤波;
高速度: 请妥协 ENOB,选用高速 SAR ADC 或加上 DSP 降噪;
参考电源、LDO、π 滤波器等电源噪声路径对这一 ENOB 损耗也非常关键,前面已进行了建模,当然了我也会写更多的仿真内容。











暂无评论