确定
结果:搜索“
卡尔曼滤波
”相关内容
推荐
课程
文章
问答
文库
电子芯期天
本平台致力于分享各种电子电路开发设计资料及经验。
关注
卡尔曼滤波:最优状态估计的核心算法
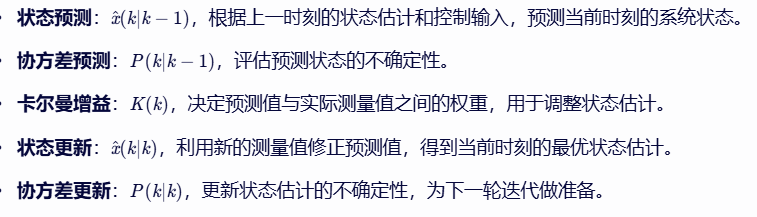
其本质是一种递归算法,通过融合不可靠的预测与含噪声的测量,在最小均方误差意义下得到系统状态的最优估计。1、算法核心:预测-校正循环预测(时间更新):基于系统模型,推演当前状态与不确定性。校正(测量更新):利用新观测数据,对预测进行加权修正,
2025-09-18 14:50:53
文章
嵌入式大杂烩
分享嵌入式电子级设计的经验、心得、程序设计架构及测试
关注
单片机工程师必须要掌握的十大核心算法
在资源有限的单片机中,算法是驯服物理信号的唯一缰绳。一、滤波降噪类均值滤波 - 快速平滑随机干扰中值滤波 - 消除突发性脉冲噪声卡尔曼滤波 - 动态系统状态最优估计滑动平均滤波 - 实时流式数据处理二、控制算法类PID控制 - 误差比例/积
2025-08-12 11:50:10
文章
美男子玩编程
美男子玩编程
关注
STM32实现九轴IMU的卡尔曼滤波
九轴IMU通常由以下三部分组成:三轴加速度计:测量线性加速度,可用于确定重力方向和线性运动三轴陀螺仪:测量角速度,用于检测旋转运动三轴磁力计:测量地磁场,提供绝对方向参考这些传感器的互补特性使得传感器融合成为必要。融合算法通过结合各传感器数据,克服单一传感器的局限性,提供更准确的姿态估计。由于各传感
2025-05-22 15:56:12
文章
嵌入式大杂烩
分享嵌入式电子级设计的经验、心得、程序设计架构及测试
关注
卡尔曼滤波器算法是什么?有什么用?
0 评论
1794 浏览
2024-09-07 15:48:12
文章



 2025-09-18 14:50:53
2025-09-18 14:50:53