
由于受端负荷量持续增大,直流输电受端系统的电压稳定性能自然引起了人们的关注。目前,交直流混合电网的电压稳定分析大致分为两类,即静态电压稳定分析和动态电压稳定分析,本聚焦于前者。传统分析中,有效短路比评价交直流电网的强度,VSI指标评价受端电网电压稳定性,但两者均未能揭示受端电网电压失稳的机理。
1 交直流系统的等值模型
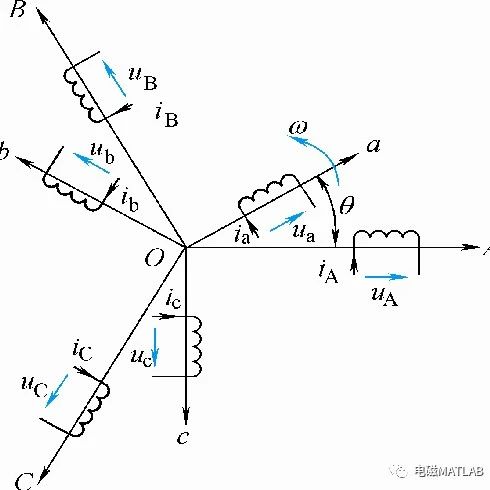
如图所示为交直流系统等值的示意
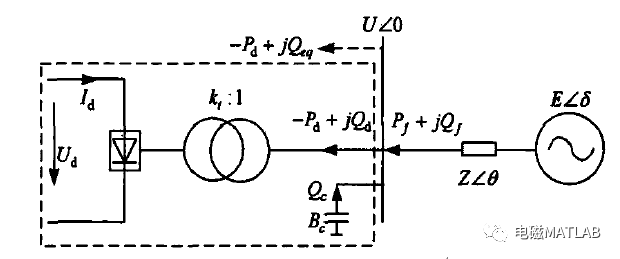
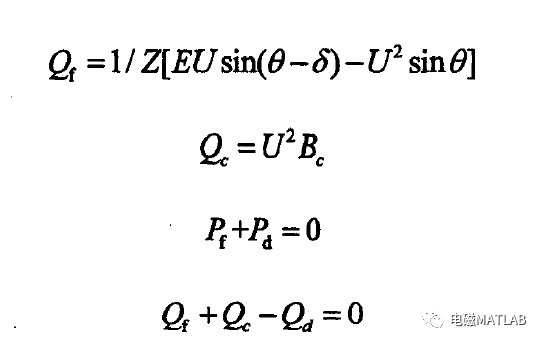
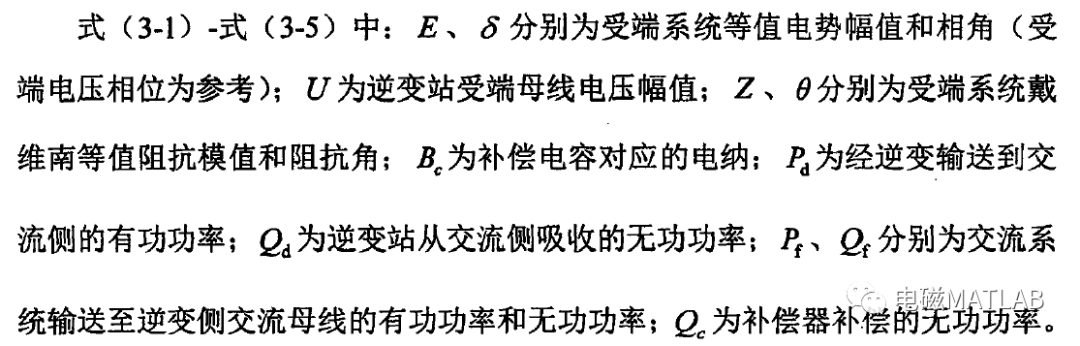
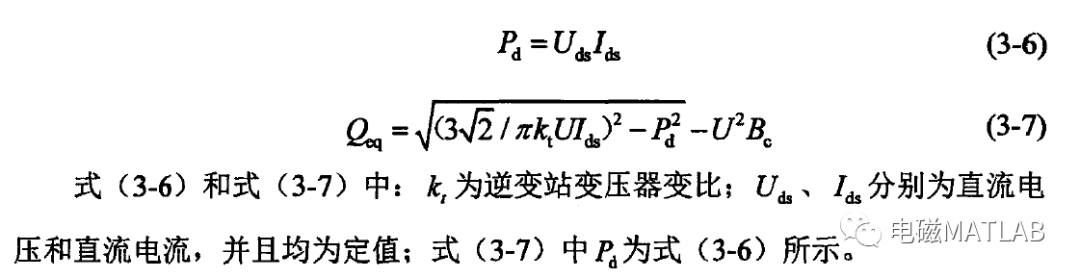
其基本特性方程可表示为式

1.1 整流器定电流逆变器定电压(CC-CU)
1.2 整流器定电流逆变器定关断角(CC-CIA)
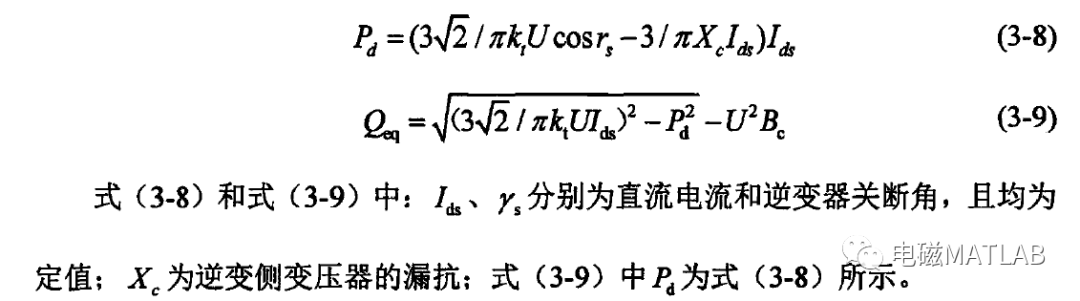
1.3 整流器定功率逆变器定电压(CP-CU)
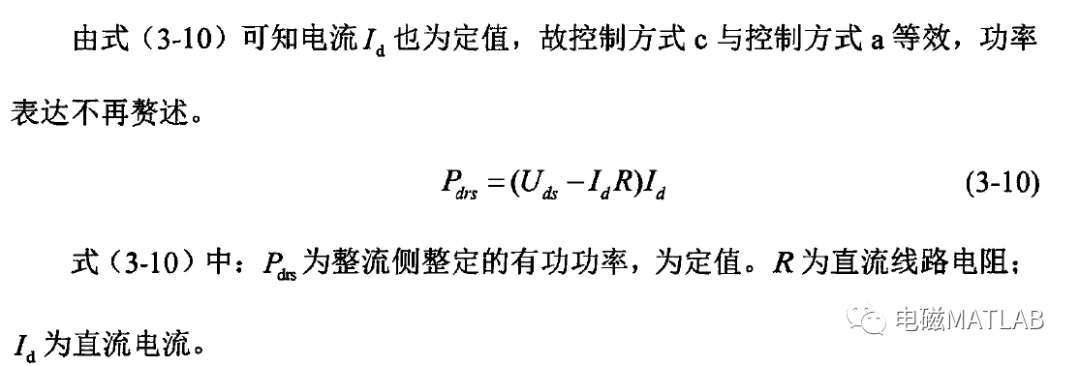
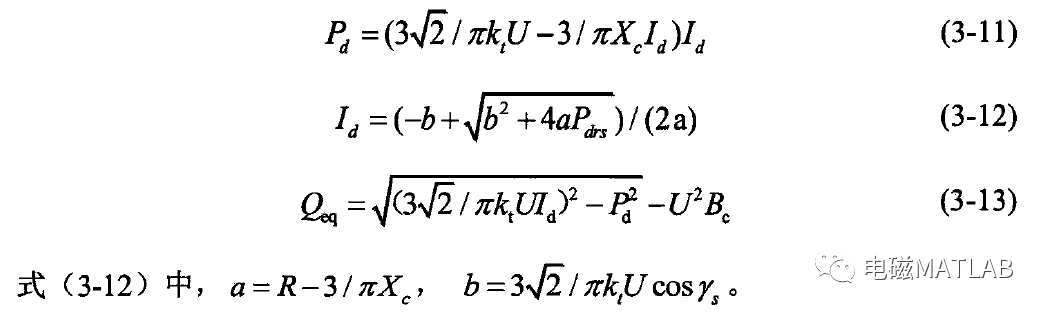
1.4 整流器定功率逆变器定关断角(CP-CIA)
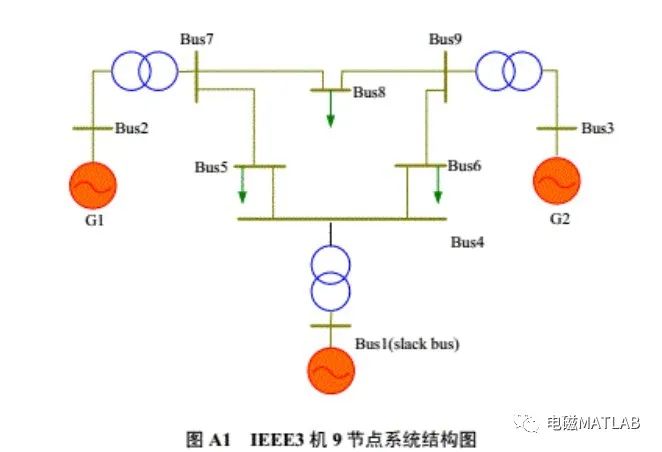
2 iEEE9节点系统算例
7与8节点改为直流支路。
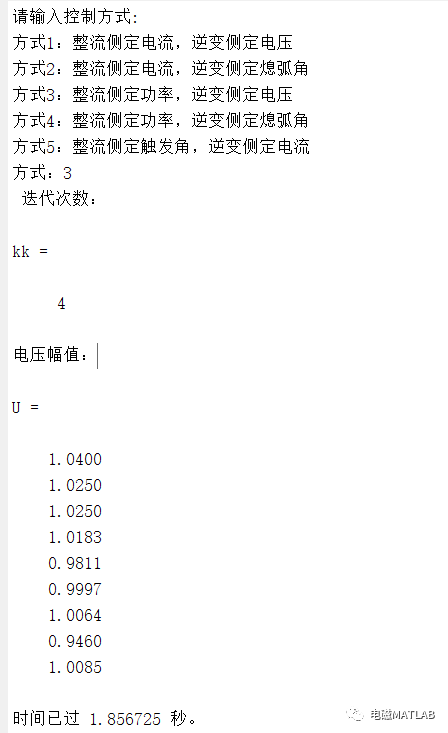
3 matlab程序运行结果
4 matlab程序
1)主函数
%% 5中控制模式,直流未知数为UD ID SD PD QD Contrl_ang 参考王云鹏文章附件控制方式
%function flow_calculationclear;clc;close allticeval('case9')T=0.00001;%% 参数kk=1;%迭代次数line=size(Line.con,1);%支路数目n=max(Bus.con(:,1));%找出第1,2列的最大值,即节点数TT=ones(n,1)*T;%收敛误差设置%% 创建导纳矩阵YY=zeros(n);%创建导纳矩阵YU=ones(n,1);dU=zeros(n,1);U(PV.con(:,1))=PV.con(:,5);U(SW.con(:,1))=SW.con(:,4);th=zeros(n,1);dth=zeros(n,1);Pg=zeros(n,1);Pl=zeros(n,1);Ql=zeros(n,1);Qg=zeros(n,1);Pg(PV.con(:,1))=PV.con(:,4);Pl(PQ.con(:,1))=PQ.con(:,4);Ql(PQ.con(:,1))=PQ.con(:,5);
%% 计算导纳矩阵for m=1:line a=Line.con(m,1);%首节点a b=Line.con(m,2);%末节点b z=Line.con(m,8) 1i*Line.con(m,9);%节点ab间的阻抗 y2=1i*Line.con(m,10)/2;%导纳/2 if real(z)==0 k=Line.con(m,7)*Bus.con(b,2)/Bus.con(a,2);%变比K else k=1; end Y(a,b)=-1/k/z;间互导纳 Y(b,a)=Y(a,b); Y(a,a)=Y(a,a) y2 (k-1)/(k*z) 1/k/z;%求自导纳 Y(b,b)=Y(b,b) y2 (1-k)/k^2/z 1/k/z;% C(a)=data(m,7);%输入节点a,b的补偿电容导纳% C(b)=data(m,8);end %将节点导纳的实虚部分开B=imag(Y);G=real(Y); %判断PQ、PV、平衡节点的个数PQn=size(PQ.con,1);PVn=size(PV.con,1);SWn=size(SW.con,1);%% 直流节点编号DCn=Hvdc.con(:,[1 2])';%直流节点编号ACn=setdiff(1:n,union(DCn,SW.con(1,1)))';Ndc=size(DCn,1);%直流节点个数Nac=size(ACn,1);%交流节点个数pn=setdiff(1:n,SW.con(1,1))';qn=setdiff(pn,PV.con(:,1));Pn=intersect(ACn, pn);%交流节点P方程节点Qn=intersect(ACn, qn);%交流节点Q方程节点p=size(Pn,1); %交流节点P方程个数q=size(Qn,1); %交流节点Q方程个数% YK=zeros(p q);DPa=zeros(p,1);DQa=zeros(q,1);DPt=zeros(Ndc,1);DQt=zeros(Ndc,1);Dd1=zeros(Ndc,1);Dd2=zeros(Ndc,1);Dd3=zeros(Ndc,1);Dd4=zeros(Ndc,1);Dd5=zeros(1,1);H=zeros(p Ndc);N=zeros(p Ndc,q Ndc);M=zeros(q Ndc,p Ndc);L=zeros(q Ndc);JRX=zeros(9,9);%% 直流迭代初值设置 控制方式Vd=ones(Ndc,1)*1.1562;%直流电压初值Id=0.5;% fai=ones(Ndc,1)*30/180*pi;%功率因数角初值30°Pd=0.6.*ones(Ndc,1);Qd=0.3.*ones(Ndc,1);Sd=0.5.*ones(Ndc,1);Control_ang=[20/180*pi;17/180*pi];%换流器控制角,第一个为alpha,第二个为gama% Control_ang(2)=30/180*pi;W=cos(Control_ang);Kt=ones(Ndc,1);%直流支路两端变压器变比值设置
%% 直流参数设置% ku=0.995;%换相效应常数,王锡凡181页Rdc=0.0625;%直流电阻Xc=[0.1345;0.1257];%整流及逆变侧变压器电抗,写入真实值disp('请输入控制方式:')disp('方式1:整流侧定电流,逆变侧定电压')disp('方式2:整流侧定电流,逆变侧定熄弧角')disp('方式3:整流侧定功率,逆变侧定电压')disp('方式4:整流侧定功率,逆变侧定熄弧角')disp('方式5:整流侧定触发角,逆变侧定电流')Controlmode=input('方式:');
%% 交直流计算主循环for mm=1:1000 H=zeros(p Ndc); N=zeros(p Ndc,q Ndc); M=zeros(q Ndc,p Ndc); L=zeros(q Ndc);
%求ΔPa,ΔQa,ΔPt,ΔQtPu=0;Qu=0;for m=1:p for k=1:n Pu=Pu U(Pn(m))*U(k)*(G(Pn(m),k)*cos(th(Pn(m))-th(k)) B(Pn(m),k)*sin(th(Pn(m))-th(k))); end DPa(m)=Pg(Pn(m))-Pl(Pn(m))-Pu; Pu=0;endfor m=1:q for k=1:n Qu=Qu U(Qn(m))*U(k)*(G(Qn(m),k)*sin(th(Qn(m))-th(k))-B(Qn(m),k)*cos(th(Qn(m))-th(k))); end DQa(m)=Qg(Qn(m))-Ql(Qn(m))-Qu; Qu=0;end for m=1:Ndc for k=1:n Pu=Pu U(DCn(m))*U(k)*(G(DCn(m),k)*cos(th(DCn(m))-th(k)) B(DCn(m),k)*sin(th(DCn(m))-th(k))); Qu=Qu U(DCn(m))*U(k)*(G(DCn(m),k)*sin(th(DCn(m))-th(k))-B(DCn(m),k)*cos(th(DCn(m))-th(k))); end if any(DCn(m)==Hvdc.con(:,1)) DPt(m)=Pg(DCn(m))-Pl(DCn(m))-Pu-Pd(m); DQt(m)=Qg(DCn(m))-Ql(DCn(m))-Qu-Qd(m); else DPt(m)=Pg(DCn(m))-Pl(DCn(m))-Pu Pd(m); DQt(m)=Qg(DCn(m))-Ql(DCn(m))-Qu-Qd(m);%%再仔细想想直流无功的正负号 end Pu=0; Qu=0; end
%矩阵H的形成for x=1:(p Ndc) for y=1:(p Ndc) if pn(x)==pn(y) for m=1:n H(x,x)=H(x,x) U(pn(x))*U(m)*(G(pn(x),m)*sin(th(pn(x))-th(m))-B(pn(x),m)*cos(th(pn(x))-th(m))); end H(x,x)=H(x,x)-U(pn(x))*U(pn(x))*(G(pn(x),pn(x))*sin(th(pn(x))-th(pn(x)))-B(pn(x),pn(x))*cos(th(pn(x))-th(pn(x)))); else H(x,y)=-U(pn(x))*U(pn(y))*(G(pn(x),pn(y))*sin(th(pn(x))-th(pn(y)))-B(pn(x),pn(y))*cos(th(pn(x))-th(pn(y)))); end endendHaa=H(Pn-1,Pn-1);Hat=H(Pn-1,DCn-1);Hta=H(DCn-1,Pn-1);Htt=H(DCn-1,DCn-1);H=[Haa,Hat;Hta,Htt];
%矩阵N的形成for x=1:(p Ndc) for y=1:(q Ndc) if pn(x)==qn(y) for m=1:1:n N(x,y)=N(x,y)-U(pn(x))*U(m)*(G(pn(x),m)*cos(th(pn(x))-th(m)) B(pn(x),m)*sin(th(pn(x))-th(m))); end N(x,y)=N(x,y) U(pn(x))*U(pn(x))*(G(pn(x),pn(x))*cos(th(pn(x))-th(pn(x))) B(pn(x),pn(x))*sin(th(pn(x))-th(pn(x))))-2*U(pn(x))^2*G(pn(x),pn(x)); else N(x,y)=-U(pn(x))*U(qn(y))*(G(pn(x),qn(y))*cos(th(pn(x))-th(qn(y))) B(pn(x),qn(y))*sin(th(pn(x))-th(qn(y)))); end endend% N(pn==DCn(1),qn==DCn(1))=N(pn==DCn(1),qn==DCn(1))-3*sqrt(2)/pi*cos(Control_ang(1))*Id;% N(pn==DCn(2),qn==DCn(2))=N(pn==DCn(2),qn==DCn(2))-3*sqrt(2)/pi*cos(Control_ang(2))*Id;Naa=N(Pn-1,Qn-Qn(1) 1);Nat=N(Pn-1,DCn-Qn(1) 1);Nta=N(DCn-1,Qn-Qn(1) 1);Ntt=N(DCn-1,DCn-Qn(1) 1);N=[Naa,Nat;Nta,Ntt];%矩阵M的形成for x=1:(q Ndc) for y=1:(p Ndc) if qn(x)==pn(y) for m=1:1:n M(x,y)=M(x,y)-U(qn(x))*U(m)*(G(qn(x),m)*cos(th(qn(x))-th(m)) B(qn(x),m)*sin(th(qn(x))-th(m))); end M(x,y)=M(x,y) U(qn(x))*U(qn(x))*(G(qn(x),qn(x))*cos(th(qn(x))-th(qn(x))) B(qn(x),qn(x))*sin(th(qn(x))-th(qn(x)))); else M(x,y)=U(qn(x))*U(pn(y))*(G(qn(x),pn(y))*cos(th(qn(x))-th(pn(y))) B(qn(x),pn(y))*sin(th(qn(x))-th(pn(y)))); end endendMaa=M(Qn-Qn(1) 1,Pn-1);Mat=M(Qn-Qn(1) 1,DCn-1);Mta=M(DCn-Qn(1) 1,Pn-1);Mtt=M(DCn-Qn(1) 1,DCn-1);M=[Maa,Mat;Mta,Mtt];%矩阵L的形成for x=1:(q Ndc) for y=1:(q Ndc) if qn(x)==qn(y) for m=1:1:n L(x,y)=L(x,y)-U(qn(x))*U(m)*(G(qn(x),m)*sin(th(qn(x))-th(m))-B(qn(x),m)*cos(th(qn(x))-th(m))); end L(x,y)=L(x,y) U(qn(x))*U(qn(x))*(G(qn(x),qn(x))*sin(th(qn(x))-th(qn(x)))-B(qn(x),qn(x))*cos(th(qn(x))-th(qn(x)))) 2*U(qn(x))^2*B(qn(x),qn(x)); else L(x,y)=-U(qn(x))*U(qn(y))*(G(qn(x),qn(y))*sin(th(qn(x))-th(qn(y)))-B(qn(x),qn(y))*cos(th(qn(x))-th(qn(y)))); end endend% L(qn==DCn(1),qn==DCn(1))=N(qn==DCn(1),qn==DCn(1))-3*sqrt(2)/pi*cos(Control_ang(1))*Id*tan(fai(1));% L(qn==DCn(2),qn==DCn(2))=N(qn==DCn(2),qn==DCn(2))-3*sqrt(2)/pi*cos(Control_ang(2))*Id*tan(fai(2));Laa=L(Qn-Qn(1) 1,Qn-Qn(1) 1);Lat=L(Qn-Qn(1) 1,DCn-Qn(1) 1);Lta=L(DCn-Qn(1) 1,Qn-Qn(1) 1);Ltt=L(DCn-Qn(1) 1,DCn-Qn(1) 1);L=[Laa,Lat;Lta,Ltt];
%求Δd1----Δd3 for m=1:Ndc Dd1(m)=Vd(m)-3*sqrt(2)/pi*U(DCn(m))*W(m) 3/pi*Xc(m)*Id; Dd2(m)=Pd(m)-Vd(m)*Id; Dd3(m)=Sd(m)-3*sqrt(2)/pi*U(DCn(m))*Id; Dd4(m)=Sd(m).^2-Pd(m).^2-Qd(m).^2; endDd5=(1/Rdc*Vd(1)-1/Rdc*Vd(2))-Id; %% JPX JQX JRV JRX
switch Controlmode case 1JRX_1=eye(2);
JRX_2=[-3*sqrt(2)/pi*Kt(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*Kt(2)*U(DCn(2))];JRX_3=zeros(2);
JRX=[[1;0],JRX_2,zeros(2,6);[-Id;0],JRX_3,JRX_1,JRX_3,JRX_3;[0;0],JRX_3,JRX_3,JRX_1,JRX_3;... [0;0],JRX_3,[-2*Pd(1),0;0,-2*Pd(2)],[2*Sd(1),0;0,2*Sd(2)],[-2*Qd(1),0;0,-2*Qd(2)];1/Rdc,zeros(1,7),0];%%为使雅可比矩阵不奇异,将JRX对角线元素为0设为1
JPX=zeros(2,9);JPX(1,4)=-1;JPX(2,5)=1;
JQX=zeros(2,9);JQX(1,8)=-1;JQX(2,9)=-1;
JRV_1=[-3*sqrt(2)/pi*W(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*W(2)*U(DCn(2))];JRV_2=[-3*sqrt(2)/pi*Id*U(DCn(1)),0;0,-3*sqrt(2)/pi*Id*U(DCn(2))];JRV=[JRV_1;zeros(2);JRV_2;zeros(3,2)];
J=[H,N,[zeros(6,9);JPX];M,L,[zeros(4,9);JQX];zeros(9,8),zeros(9,4),JRV,JRX];DD=-inv(J)*[DPa;DPt;DQa;DQt;Dd1;Dd2;Dd3;Dd4;Dd5]; %将增量加到U th上
dth(Pn)=DD(1:6); dth(DCn)=DD(7:8); dU(Qn)=DD(9:12).*U(Qn); dU(DCn)=DD(13:14).*U(DCn); dVd=DD(15); dW=DD(16:17); dPd=DD(18:19); dSd=DD(20:21); dQd=DD(22:23); th=th dth; U=U dU; Vd(1)=Vd(1) dVd; W=W dW; Pd=Pd dPd; Sd=Sd dSd; Qd=Qd dQd; case 2JRX_1=eye(2);
JRX_2=[-3*sqrt(2)/pi*Kt(1)*U(DCn(1));0];JRX_3=zeros(2);
JRX=[JRX_1,JRX_2,zeros(2,6);[-Id,0;0,-Id],[0;0],JRX_1,JRX_3,JRX_3;[0;0],JRX_3,JRX_3,JRX_1,JRX_3;... [0;0],JRX_3,[-2*Pd(1),0;0,-2*Pd(2)],[2*Sd(1),0;0,2*Sd(2)],[-2*Qd(1),0;0,-2*Qd(2)];1/Rdc,-1/Rdc,zeros(1,7)];%%为使雅可比矩阵不奇异,将JRX对角线元素为0设为1
JPX=zeros(2,9);JPX(1,4)=-1;JPX(2,5)=1;
JQX=zeros(2,9);JQX(1,8)=-1;JQX(2,9)=-1;
JRV_1=[-3*sqrt(2)/pi*W(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*W(2)*U(DCn(2))];JRV_2=[-3*sqrt(2)/pi*Id*U(DCn(1)),0;0,-3*sqrt(2)/pi*Id*U(DCn(2))];JRV=[JRV_1;zeros(2);JRV_2;zeros(3,2)];
J=[H,N,[zeros(6,9);JPX];M,L,[zeros(4,9);JQX];zeros(9,8),zeros(9,4),JRV,JRX];DD=-inv(J)*[DPa;DPt;DQa;DQt;Dd1;Dd2;Dd3;Dd4;Dd5]; %将增量加到U th上
dth(Pn)=DD(1:6); dth(DCn)=DD(7:8); dU(Qn)=DD(9:12).*U(Qn); dU(DCn)=DD(13:14).*U(DCn); dVd=DD(15:16); dW=DD(17); dPd=DD(18:19); dSd=DD(20:21); dQd=DD(22:23); th=th dth; U=U dU; Vd=Vd dVd; W(1)=W(1) dW; Pd=Pd dPd; Sd=Sd dSd; Qd=Qd dQd; case 3JRX_1=eye(2);
JRX_2=[-3*sqrt(2)/pi*Kt(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*Kt(2)*U(DCn(2))];JRX_3=zeros(2);
JRX=[[1;0],JRX_2,zeros(2,1),JRX_3,JRX_3,[3/pi*Xc(1);3/pi*Xc(2)];[-Id;0],JRX_3,[0;1],JRX_3,JRX_3,[-Vd(1);-Vd(2)];[0;0],JRX_3,[0;0],JRX_1,JRX_3,[-3*sqrt(2)/pi*Kt(1)*U(DCn(1));-3*sqrt(2)/pi*Kt(2)*U(DCn(2))];... [0;0],JRX_3,[0;-2*Pd(2)],[2*Sd(1),0;0,2*Sd(2)],[-2*Qd(1),0;0,-2*Qd(2)],[0;0];1/Rdc,zeros(1,7),-1];%%为使雅可比矩阵不奇异,将JRX对角线元素为0设为1
JPX=zeros(2,9);JPX(2,4)=1;
JQX=zeros(2,9);JQX(1,7)=-1;JQX(2,8)=-1;
JRV_1=[-3*sqrt(2)/pi*W(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*W(2)*U(DCn(2))];JRV_2=[-3*sqrt(2)/pi*Id*U(DCn(1)),0;0,-3*sqrt(2)/pi*Id*U(DCn(2))];JRV=[JRV_1;zeros(2);JRV_2;zeros(3,2)];
%% 雅可比矩阵J=[H,N,[zeros(6,9);JPX];M,L,[zeros(4,9);JQX];zeros(9,8),zeros(9,4),JRV,JRX];DD=-inv(J)*[DPa;DPt;DQa;DQt;Dd1;Dd2;Dd3;Dd4;Dd5]; %将增量加到U th上
dth(Pn)=DD(1:6); dth(DCn)=DD(7:8); dU(Qn)=DD(9:12).*U(Qn); dU(DCn)=DD(13:14).*U(DCn); dVd=DD(15); dW=DD(16:17); dPd=DD(18); dSd=DD(19:20); dQd=DD(21:22); dId=DD(23); th=th dth; U=U dU; Vd(1)=Vd(1) dVd; W=W dW; Pd(2)=Pd(2) dPd; Sd=Sd dSd; Qd=Qd dQd; Id=Id dId; case 4JRX_1=eye(2);
JRX_2=[-3*sqrt(2)/pi*Kt(1)*U(DCn(1));0];JRX_3=zeros(2);
JRX=[JRX_1,JRX_2,zeros(2,1),JRX_3,JRX_3,[3/pi*Xc(1);3/pi*Xc(2)];[-Id,0;0,-Id],[0;0],[0;1],JRX_3,JRX_3,[-Vd(1);-Vd(2)];[0;0],JRX_3,[0;0],JRX_1,JRX_3,[-3*sqrt(2)/pi*Kt(1)*U(DCn(1));-3*sqrt(2)/pi*Kt(2)*U(DCn(2))];... [0;0],JRX_3,[0;-2*Pd(2)],[2*Sd(1),0;0,2*Sd(2)],[-2*Qd(1),0;0,-2*Qd(2)],[0;0];1/Rdc,-1/Rdc,zeros(1,6),-1];%%为使雅可比矩阵不奇异,将JRX对角线元素为0设为1
JPX=zeros(2,9);JPX(2,4)=1;
JQX=zeros(2,9);JQX(1,7)=-1;JQX(2,8)=-1;
JRV_1=[-3*sqrt(2)/pi*W(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*W(2)*U(DCn(2))];JRV_2=[-3*sqrt(2)/pi*Id*U(DCn(1)),0;0,-3*sqrt(2)/pi*Id*U(DCn(2))];JRV=[JRV_1;zeros(2);JRV_2;zeros(3,2)];
%% 雅可比矩阵J=[H,N,[zeros(6,9);JPX];M,L,[zeros(4,9);JQX];zeros(9,8),zeros(9,4),JRV,JRX];DD=-inv(J)*[DPa;DPt;DQa;DQt;Dd1;Dd2;Dd3;Dd4;Dd5]; %将增量加到U th上
dth(Pn)=DD(1:6); dth(DCn)=DD(7:8); dU(Qn)=DD(9:12).*U(Qn); dU(DCn)=DD(13:14).*U(DCn); dVd=DD(15:16); dW=DD(17); dPd=DD(18); dSd=DD(19:20); dQd=DD(21:22); dId=DD(23); th=th dth; U=U dU; Vd=Vd dVd; W(1)=W(1) dW; Pd(2)=Pd(2) dPd; Sd=Sd dSd; Qd=Qd dQd; Id=Id dId; case 5JRX_1=eye(2);
JRX_2=[0;-3*sqrt(2)/pi*Kt(2)*U(DCn(2))];JRX_3=zeros(2);
JRX=[JRX_1,JRX_2,zeros(2,1),JRX_3,JRX_3,[3/pi*Xc(1);3/pi*Xc(2)];[-Id,0;0,-Id],[0;0],[1,0;0,1],JRX_3,JRX_3;[0;0],JRX_3,JRX_3,JRX_1,JRX_3;... [0;0],JRX_3,[-2*Pd(1),0;0,-2*Pd(2)],[2*Sd(1),0;0,2*Sd(2)],[-2*Qd(1),0;0,-2*Qd(2)];1/Rdc,-1/Rdc,zeros(1,6),0];%%为使雅可比矩阵不奇异,将JRX对角线元素为0设为1
JPX=zeros(2,9);JPX(2,4)=1;
JQX=zeros(2,9);JQX(1,7)=-1;JQX(2,8)=-1;
JRV_1=[-3*sqrt(2)/pi*W(1)*U(DCn(1)),0;0,-3*sqrt(2)/pi*W(2)*U(DCn(2))];JRV_2=[-3*sqrt(2)/pi*Id*U(DCn(1)),0;0,-3*sqrt(2)/pi*Id*U(DCn(2))];JRV=[JRV_1;zeros(2);JRV_2;zeros(3,2)];
%% 雅可比矩阵J=[H,N,[zeros(6,9);JPX];M,L,[zeros(4,9);JQX];zeros(9,8),zeros(9,4),JRV,JRX];DD=-inv(J)*[DPa;DPt;DQa;DQt;Dd1;Dd2;Dd3;Dd4;Dd5]; %将增量加到U th上
dth(Pn)=DD(1:6); dth(DCn)=DD(7:8); dU(Qn)=DD(9:12).*U(Qn); dU(DCn)=DD(13:14).*U(DCn); dVd=DD(15:16); dW=DD(17); dPd=DD(18:19); dSd=DD(20:21); dQd=DD(22:23); th=th dth; U=U dU; Vd=Vd dVd; W(2)=W(2) dW; Pd=Pd dPd; Sd=Sd dSd; Qd=Qd dQd; end AP=abs(DD);%取模值
%判断是否收敛
if(max(AP)<1e-5)> break;end
kk=kk 1; end if mm==200 disp('注意:结果不收敛!');end disp(' 迭代次数:') kk disp('电压幅值:') U toc
2)子函数
Bus.con = [ ... 1 16.5 1 0 4 1; 2 18 1 0 5 1; 3 13.8 1 0 3 1; 4 230 1 0 2 1; 5 230 1 0 2 1; 6 230 1 0 2 1; 7 230 1 0 2 1; 8 230 1 0 2 1; 9 230 1 0 2 1; ];
Line.con = [ ... 9 8 100 230 60 0 0 0.0119 0.1008 0.209 0 0 0 0 0 1; 9 6 100 230 60 0 0 0.039 0.17 0.358 0 0 0 0 0 1; 7 5 100 230 60 0 0 0.032 0.161 0.306 0 0 0 0 0 1; 5 4 100 230 60 0 0 0.01 0.085 0.176 0 0 0 0 0 1; 6 4 100 230 60 0 0 0.017 0.092 0.158 0 0 0 0 0 1; 2 7 100 18 60 0 0.07826087 0 0.0625 0 0 0 0 0 0 1; 3 9 100 13.8 60 0 0.06 0 0.0586 0 0 0 0 0 0 1; 1 4 100 16.5 60 0 0.07173913 0 0.0576 0 0 0 0 0 0 1; ];
SW.con = [ ... 1 100 16.5 1.04 0 99 -99 1.1 0.9 0.8 1 1 1; ];
PV.con = [ ... 2 100 18 1.63 1.025 99 -99 1.1 0.9 1 1; 3 100 13.8 0.85 1.025 99 -99 1.1 0.9 1 1; ];
PQ.con = [ ... 6 100 230 0.9 0.3 1.2 0.8 0 1; 8 100 230 1 0.35 1.2 0.8 0 1; 5 100 230 1.25 0.5 1.2 0.8 0 1; ];
Hvdc.con = [ ... 7 8 100 230 230 45 300 0.3 0.1345 0.1257 1 1 20 25 0.0625 0.2 120 5 17 17 1.2 0.1 1.1 0 1 0.5 0.5 1 1; ];
Bus.names = {... 'Bus 1'; 'Bus 2'; 'Bus 3'; 'Bus 4'; 'Bus 5'; 'Bus 6'; 'Bus 7'; 'Bus 8'; 'Bus 9'};








暂无评论