
随着时代发展,永磁同步电机(PMSM)凭借高效率、高功率密度与精准控制能力,已成为新能源汽车、工业机器人、精密机床等领域的核心驱动部件。但PMSM却高度依赖电机控制器,若是缺乏控制器,甚至无法正常启动,这是为什么?

1、PMSM的缺点
①相序与转子同步依赖
PMSM转子为永磁体,需定子绕组产生旋转磁场“牵引”转子同步旋转。
控制器作用:通过逆变器精确控制三相电压的相位、幅值与频率,确保磁场与转子位置实时同步(矢量控制/FOC)。
②正反转与调速无自驱能力
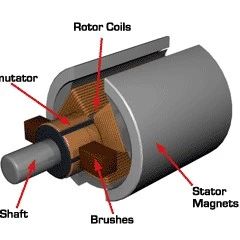
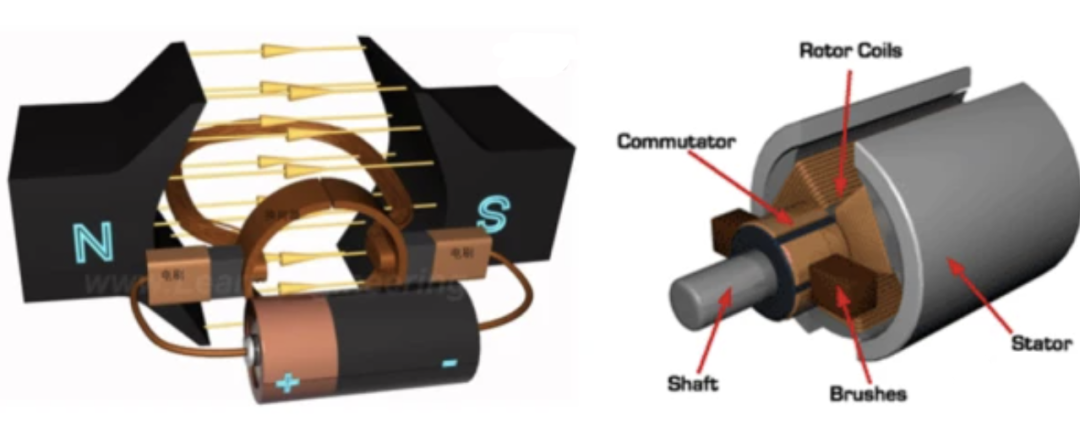
PMSM无电刷换向,无法像有刷电机通过电压极性反转实现换向。
控制器作用:通过算法动态调整三相电压相位差(如120°电角度),实现正反转切换;通过PWM调压调频实现无级调速(0-数万RPM)。
2、电机控制器的五大核心
①速度/扭矩/功率的动态分配
场景:电动车需根据油门开度实时调节扭矩,工业机器人需根据负载调整功率。
实现方式:控制器通过电流环、速度环双闭环控制,将输入指令转化为三相电流参考值,驱动PMSM输出目标参数。
②启动与软启动控制
硬启动风险:PMSM直接通电会导致转子与定子磁场“硬同步”,引发大电流冲击(堵转电流可达额定电流5-7倍)。
控制器作用:通过斜坡函数或S形曲线缓慢提升电压频率,实现平滑启动(如特斯拉Model 3电机启动电流限制在2倍额定值内)。
③故障诊断与主动保护
关键故障:过流(短路)、过压(母线电压飙升)、欠压(电池馈电)、过热(IGBT/电机绕组)。
控制器作用:
实时监测电流/电压/温度传感器数据。
触发保护动作(如切断驱动、限制功率、报警)。
示例:博世电机控制器在IGBT温度超150℃时自动降额运行。
④动态响应优化:加速/减速平稳性
挑战:PMSM在负载突变时易产生转矩脉动(如电梯启停顿挫)。
控制器作用:
前馈补偿:根据负载转矩预调整电流指令。
滤波算法:消除电流谐波(如SVPWM调制降低谐波含量30%)。
示例:ABB机器人关节电机控制器通过模型预测控制(MPC)实现±0.1°位置精度。
⑤过载与弱磁控制
过载场景:电动车爬坡、机床切削力突变。
控制器作用:
短时过载:允许1.5-2倍额定电流持续10-60秒(依赖散热设计)。
弱磁扩速:基速以上通过注入负d轴电流削弱磁场,突破额定转速限制(如PMSM基速3000RPM,弱磁后可提升至10000RPM)。
本文凡亿教育原创文章,转载请注明来源!






暂无评论