
在这个万物互联的时代,定位已经成了信息社会运转的核心要素,UWB以其独特的优势从 Wi-Fi、蓝牙、红外线、超宽带、RFID、ZigBee和超声波等众多的无线定位技术中脱颖而出,今天我们很有必要说说UWB测距的基本原理。
1 测距原理:ToF(Time Of Flight 飞行时间)
UWB实际是通过ToF 来测距,主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距离。单边双向测距:(SS-TWR,Single Sided - Two-Way Ranging)每个模块从启动开始即会生成一条独立的时间戳。
UWB 模块 A 在其时间戳上的 Ta1 时刻发射请求性质的脉冲信号,UWB 模块 B 在其时间戳上的 Tb1 时刻接收到该信号,然后对 UWB 信号加以一定的处理手段后,UWB 模块 B 在 Tb2 时刻发射一个响应性质的信号被 UWB 模块 A 在自己的时间戳 Ta2 时刻接收。
由此可以计算出脉冲信号在两个 UWB 模块之间的飞行时间 ToFA_B,从而乘以光速 c 就能确定两个模块之间的距离了。
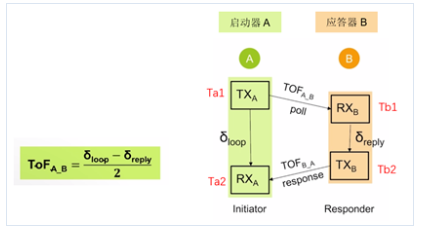
图 1 SS-TWR 测距示意图▲
这里单纯的 ToF 算法有一个比较严格的约束:发送设备和接收设备必须时钟同步,这是一个比较棘手的问题,所以在 UWB 的应用中不常用,但对于特定的应用,如果对于精度要求不是很高,且需要更短的测距时间可以采用。
为了降低时钟偏移的影响,UWB 测距中经常采用双边双向测距方法(DS-TWR,Double Sided - Two-Way Ranging),反向测量补偿,UWB 模块 A 在其时间戳上的 Ta1 时刻发射请求性质的脉冲信号,UWB 模块 B 在其时间戳上的 Tb1 时刻接收到该信号,然后对 UWB 信号加以一定的处理手段后,UWB 模块 B 在 Tb2 时刻同时发射响应性质和请求性质的信号被UWB 模块 A 在自己的时间戳 Ta2 时刻接收,处理一段时间后在 Ta3 时刻回复响应信号被模块 B 在其时间戳的 Tb3 时刻接收。
由此可以计算出脉冲信号在两个 UWB 模块之间的飞行时间 ToFA_B,从而乘以光速 c 就能确定两个模块之间的距离了。
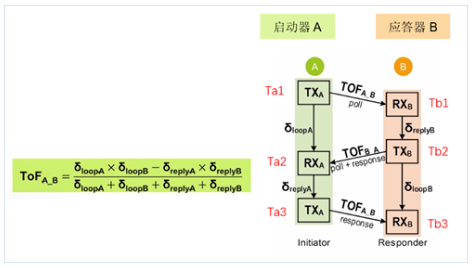
图 2 DS-TWR 测距示意图▲
2 定位原理
常见的 UWB 定位技术有 TOA(Time of Arrival)、TDOA (Time Difference of Arrival)与 AOA(Angel of Arrival)。
TOA 定位通过分别测量移动终端与三个或更多基站之间信号的传播时间来定位,它采用了圆周定位。假如己知移动终端到基站 i 的直线距离为 Ri,那么由几何原理可知,移动终端的位置一定在以基站 i 的位置为圆心,Ri 为半径的圆周上。
同理可得,多个圆的共同交点就是移动终端的位置。
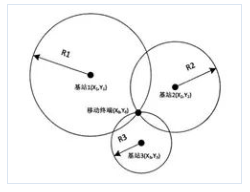
图 3 TOA 定位示意图▲
TOA 定位的缺点是对传播中产生的误差比较敏感,这些误差来自于传播中的反射、 多径传播、非视距传播和噪声等干扰,会造成各圆无法相交或相交处不是一个点而是一个区域。
同时 TOA 定位要求移动终端和基站之间在时间上要准确同步,1ns 的同步误差将会给定位带来大约 0.3 米的不确定性。纳秒级的同步精度在许多通信系统中是达不到的。因此,实际中很少使用单纯的 TOA 定位。
TDOA 定位就是对 TOA 做了改进,不必要进行基站和移动终端之间的同步,而只需要基站之间进行同步。因为基站的位置是固定的,基站之间进行同步与基站和移动终端之间进行同步要容易实现得多,所以 TDOA 定位的应用非常广泛。
它通过测量出两个不同基站与移动终端的传输时延差来进行定位。假设移动终端的位置与基站 1 和基站 2 的距离差为 R21=R2-R1,则移动终端的位置必定在以两个基站为焦点,与两个焦点的距离差恒为R21的双曲线上。
再通过另一组移动终端与基站 1、基站 3 或基站 2 基站 3 的 TDOA,可以得到另一组双曲线,通过多组双曲线交于一点也就确认了 UWB 移动终端的位置。
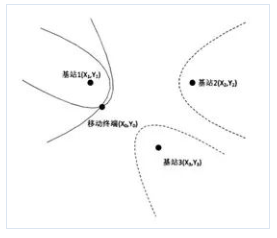
图 4 TDOA 定位示意图▲
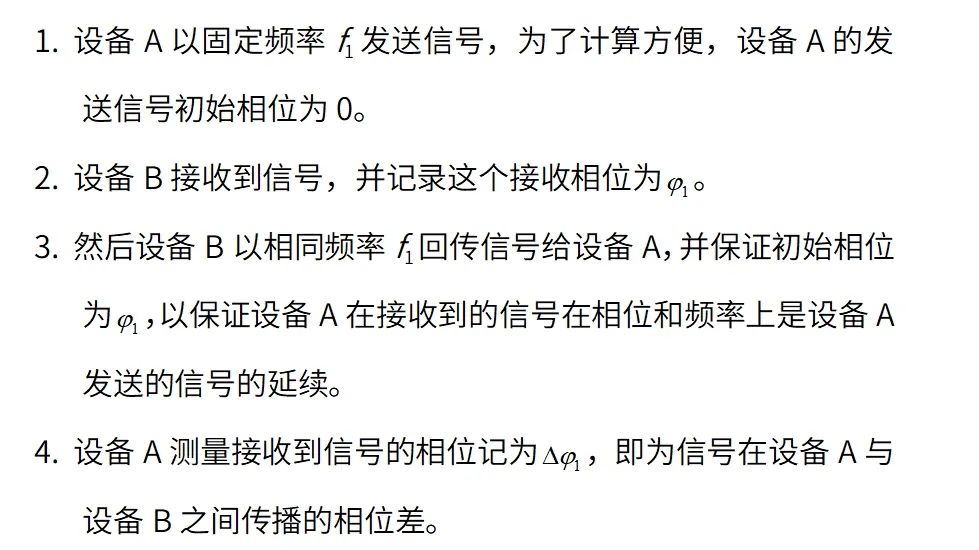
AOA 定位一般是基于相位差的方式计算出到达角度,一般不单独使用,由于 AOA 涉及到角度分辨率的问题,单纯 AOA 定位,若离基站越远,定位精度就越差,所以 AOA 定位多见于中、短距离的定位。
AOA 的优点是所需要的基站比较少,最少只要两个基站就可以进行定位。在 LTE 系统中应用了 OFDM 和多天线阵技术,使得基于 LTE 的 AOA 定位成为了研究热点。
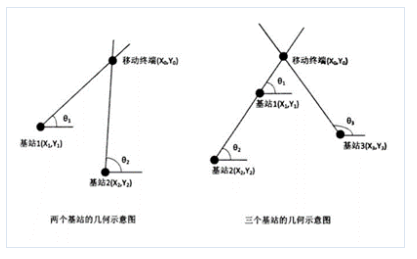
图 5 AOA 定位示意图▲
事实上,使用环境比较复杂,一般是采用 TOA(到达时间)、TDOA(到达时间差)、AOA(到达角度)这三种定位技术的混合技术,取长补短,让最终的定位性能得到优化。
声明:本文转载自网络,如涉及作品内容、版权和其它问题,请于联系工作人员,我们将在第一时间和您对接删除处理!







暂无评论