
今天我们来学习电子磁力计HMC5883L的使用。先介绍磁力计的基础知识,再给一个获取磁力计数据的例子,最后讲解HMC5883L磁力计的校准,以及一些使用中的经验。
1)HMC5883L磁力计的基础知识
磁力计是用来测量磁场强弱(也就是磁感应强度)的,磁感应强度是一个矢量,我们本篇使用的HMC5883L可以用来测量三个轴向的磁感应强度。
磁感应强度的标准单位是特斯拉T(Tesla),也有用高斯Ga(Gauss)来表示的,换算关系是1Tesla=10000Gauss。
当垂直于磁场方向长度为1m的导体,通过1A电流时,所受磁场的作用力的大小为1N,则该磁场的磁感应强度为1T。
磁力计可以用来检测地球磁场方向,也就是作为指南针使用,在航模或者四轴飞行器中,可以用来修正偏航角。
2)HMC5883L的数据获取
HMC5883L器件比较小,而且引脚在芯片底下,焊接难度较大,一般建议使用已焊好的模块。本文使用是硬件是STM32F103C8T6最小系统和如下的GY-273模块:
硬件连接上,磁力计模块上只连VCC、GND、SCL、SDA四根线,SCL连接到stm32的PB6,SDA连接到stm32的PB7,由于该模块的电路板上已经设计了上拉电阻,所以I2C接口的两根线不用再外接上拉了。
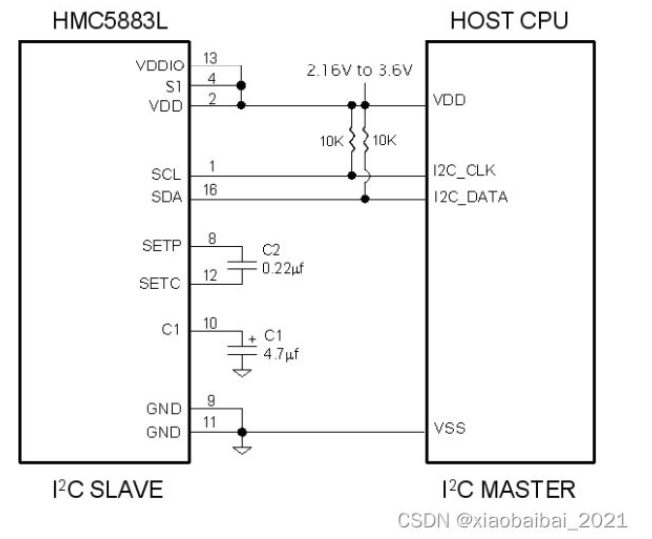
如果想自己绘制电路板,也可以按如下图纸设计:
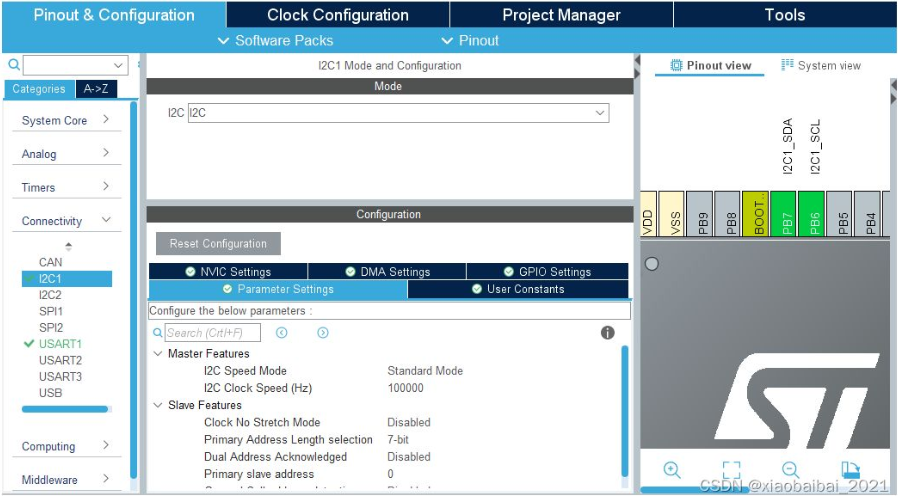
接着是软件设计,在cubemx中创建工程,使用I2C1,此时可以看到PB6和PB7被占用为I2C引脚:
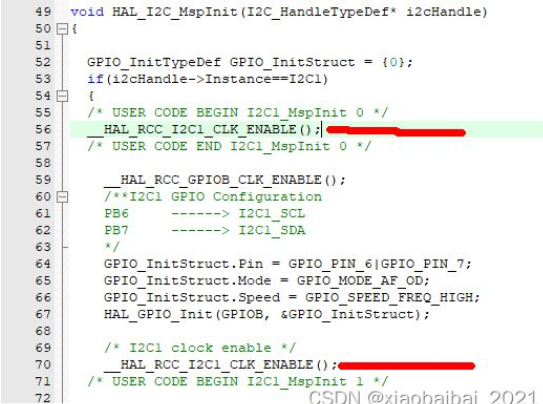
生成工程文件,在keil中打开,先修正cubemx的一个bug,把I2C时钟使能语句提前:
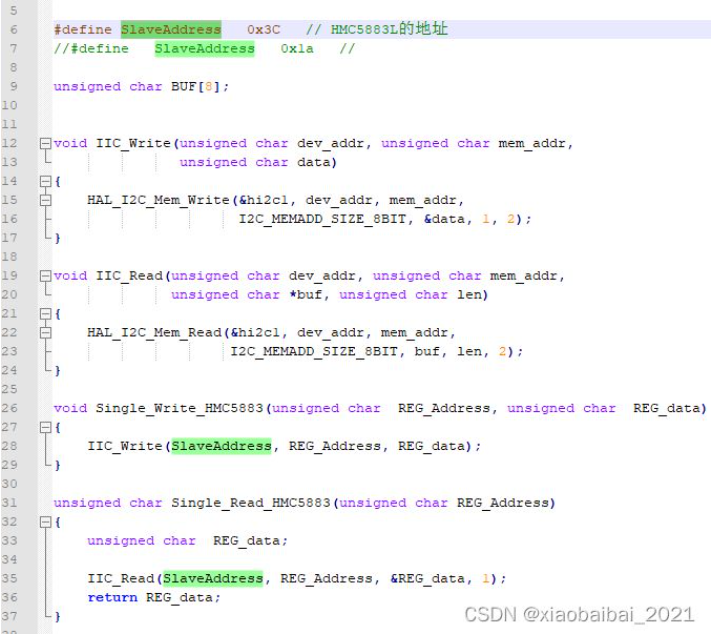
对I2C代码进行一次封装,使用HAL库函数来实现底层的I2C操作,如下用HAL_I2C_Mem_Write和HAL_I2C_Mem_Read两个函数实现:
有了底层的I2C读写函数,我们对HMC5883L的初始化和数据读取时就方便多了。
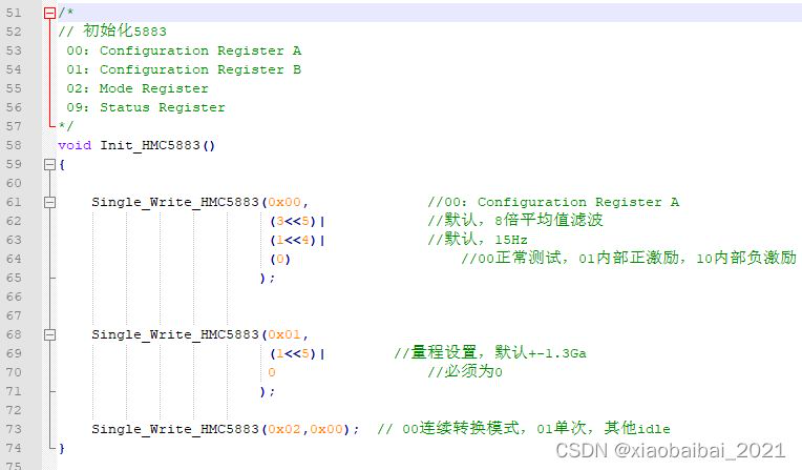
按照数据手册的寄存器说明,初始化时,只需要设置三个寄存器就行:
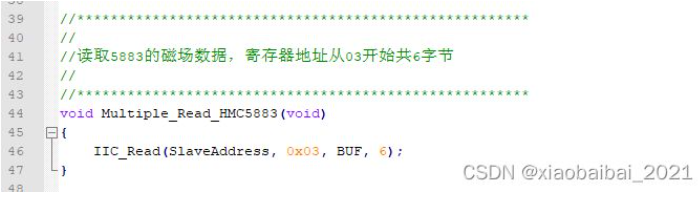
然后就可以读取数据了,三个轴向的磁感应强度数据,在寄存器03开始的连续6个字节中,读取后,存放在BUF数组里:
在主函数中,先调用初始化函数,再循环读取数据就行了:
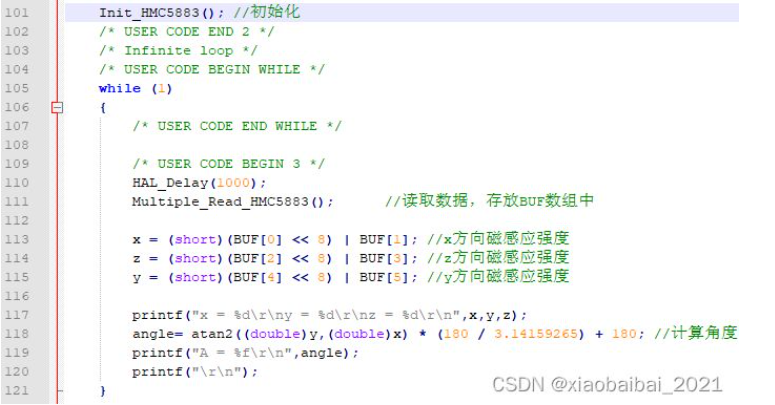
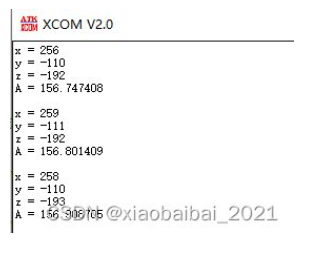
这里将x、y、z三个方向的原始数据都打印出来的,并且计算了x、y方向的反正切角度,如果传感器是水平放置的,x、y方向测量的就是水平方向的磁感应强度,周围没有磁场干扰的话,它们的反正切角度就能指示出地磁场的方向。
上图中atan2(y,x)函数计算的是y/x的反正切,得到的角度是x轴与地磁北向的夹角。运行结果如下图:
3)HMC5883L的校准
上面我们已经成功获取了HMC5883L的数据,但是,一般来说都是不太准确的。这是因为传感器初始有误差,并且周围可能有铁制品的器件也会干扰磁场的方向。
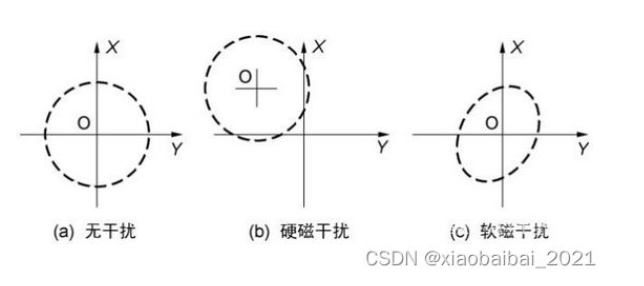
如下图所示,只考虑X、Y两个方向,传感器旋转一周时,测量到的地球磁场方向应该如(a)所示是一个正圆形,但是由于受到各种影响,实际可能是一个中心偏离原点的椭圆形:
因此,数据需要校准之后才能有比较好的效果。校准通常有几个方面的工作,一是校准磁场的强度,二是校准磁场的方向。
a)磁场强度校准
在HMC5883L的数据手册里有自检和校准的方法。
简单来说,自检时,可以设置寄存器Configuration Register A的MS1和MS0这两位,使得芯片内部产生一个等效于约1.1高斯的磁感应强度加在三个方向上(实际叠加的是X、Y方向1.16Ga、Z方向1.08Ga),此时设置为单次转换模式,芯片会自动先测量一次外部磁感应强度,再测量一次叠加1.1高斯后的磁感应强度,把两次的值相减之后存放再输出寄存器中。如果增益是默认的,则X、Y轴的原始值应该在951附近,Z轴应该在886附近。(本人手头的这一只,测得的值在1120附近,基本算正常吧)。
校准时,就是把自检时测到的X、Y、Z三个方向的值,与内部叠加的磁感应强度(1.16Ga和1.08Ga)相除,算出一个比值,再用这个比值来反算测到的外部磁感应强度。
一般进行完这一步,可以一定程度地纠正(c)图中的类似变成椭圆形的误差。
b)磁场方向校准
当电路板上或者周围有铁质品或磁性物品时,会在外部叠加一个磁场,使得圆心偏离原点,如果把原始量用于计算地磁北向,就会引起很大误差。这时需要用另一种方法校准。
将传感器Z轴向上,匀速旋转一周,收集X、Y轴的数据;再X或Y轴向上,Z轴水平,匀速旋转一周,收集Z轴数据。将将读取到的各轴数据的最大值加上最小值除以2,就得到一个近似的各轴的原点偏移值,如下:
Xoffset=(Xmax+Xmin)/2
Yoffset=(Ymax+Ymin)/2
Zoffset=(Zmax+Zmin)/2
使用时,原始值减去偏移值,就是方向校准后的值:
X=X原始值-Xoffset
Y=Y原始值-Yoffset
Z=Z原始值-Zoffset
经过上面两步简单的校准后,磁力计的输出值就准确得多了。
4)一些使用经验
a)磁力计会受到周围磁铁或铁制品的影响,由于很多电子元器件(如插针、电阻、电容、芯片)内部都含有铁制品,印制板上的器件也会影响磁力计的数据,需要注意尽量远离;
b)HMC5883L芯片是霍尼韦尔生产的磁力计,同时也有国产的QMC5883L可以替换,引脚定义相同硬件上可以通用,但是寄存器不同,软件上需要进行相应的更改;
c)计算地磁场来找北向时,需要注意,地理的北向与地磁北向不是完全重合的,它们之间的夹角称为“地磁偏角”,与各地的地理位置有关,在用反正切算出地磁北向角时,再加上当地的地磁偏角进行修正即可。地磁偏角需要查资料获得,如北京地区的地磁偏角为5°50’w,也就是正北方向在地磁北向再往西偏5°50‘,使用atan2(y,x)计算出来角度后要再加上5°50‘就是相对于地理正北向的角度了;
d)只有在水平放置时,使用atan2(y,x)计算出来的角度是地磁北向的角度,如果传感器用在四轴飞行器或其他不水平的物体上,还要考虑俯仰、滚转的角度影响,方法如下:
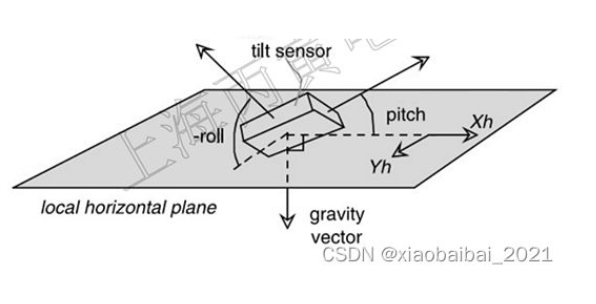
使用加速计进行倾角补偿,先要计算出横滚角(Φ)Roll、以及俯仰角(θ)Pitch,再计算X、Y方向的磁感应强度:
Xh=X*cos(θ)+Y*sin(Φ)*sin(θ)-Z*cos(Φ)*sin(θ)
Yh=Y*cos(Φ)+Z*sin(Φ)
再由Xh和Yh的反正切计算偏航角(ψ)yaw。
考虑到X、Y组成的坐标轴四个象限,可以变成如下公式:
当(Xh<0)时,ψ=180-[arctan(Yh/Xh)*180/π]
当(Xh>0,Yh<0)时,ψ=-[arctan(Yh/Xh)*180/π]
当(Xh>0,Yh>0)时,ψ=360-arctan(Yh/Xh)*180/π
当(Xh=0,Yh<0)时,ψ=90
当(Xh=0,Yh>0),ψ=270
好了,本节关于HMC5883L磁力计的使用就讲到这里了。
声明:本文转载自小白白学电子 公众号,如涉及作品内容、版权和其它问题,请于联系工作人员,我们将在第一时间和您对接删除处理!








暂无评论