
随着电子技术高速发展,机器人开始从概念转变为现实中的物体,随着时间变迁,被广泛应用在多种领域,如今这个领域又要新增一个类型,如直升机驾驶机器人。
近期,来自北京航空航天大学的李道春教授、向锦武院士组成的研究团队,成功研发出新型直升机驾驶机器人,并在《Engineering》期刊上发表了题为《Robot Pilot: A New Autonomous System Toward Flying Manned Aerial Vehicles(飞行器驾驶机器人 —— 一种面向有人飞行器的新型无人驾驶系统)》的论文。
研究团队还详细探讨了飞行器驾驶机器人的概念及优势,并大胆提出了一种针对有人直升机的直升机驾驶机器人。该新型机器人可独立驾驶有人直升机,从而形成一种新型的无人飞行系统。
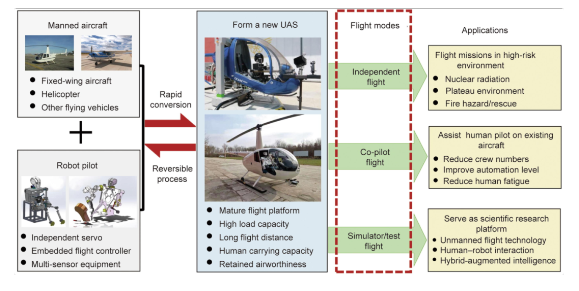
按照该研究,该机器人可根据直升机操纵机构的操控特点涉及了驾驶机器人伺服机构,并基于机器人伺服机构的运动学分析,建立了直接驱动方法的机器人飞行控制器,以减少机器人伺服过程中的时间延迟和控制误差。
研究团队还构建了一个支持不同飞行模式和功能集成的地面站系统。最终,他们设计并制造了一个直升机驾驶机器人原型,并将其安装在直升机上进行了飞行测试。测试结果显示,该机器人能够独立完成前飞、后飞、侧飞和转弯飞行,验证了其有效性。
研究团队在SVH-4轻型教练直升机上安装了驾驶机器人圆形,并进行了地面测试和飞行测试。结果证明:驾驶机器人能够快速、准确地控制直升机的操纵机构,并在悬停、前飞、后飞、侧飞和转弯等飞行任务中表现出色。
当然,研究团队还承认了该机器人的不足之处,他们指出:驾驶机器人在操控过程中存在明显的姿态振荡问题。他们计划在未来的工作中进一步提高驾驶机器人的操控性能和适应性,考虑部署基于模型的现代控制方法或智能控制方法,以优化飞行性能。












暂无评论