
MEMS陀螺仪已成为现代导航和运动感知应用中的核心组件。本文探讨双质量线性振动硅基MEMS陀螺仪的结构、驱动技术和噪声特性[1]。
1
电学模型与接口线路
高性能MEMS陀螺仪的基础在于电学建模和接口设计。等效电学模型包括陀螺仪左质量块和接口线路,其中包含驱动电容(CdL , CdL−)、驱动检测电容(CdcL , CdcL−)和检测电容(CsL , CsL−)。

图1:展示双质量线性振动硅基MEMS陀螺仪左质量及接口线路的等效电学模型,说明关键组件和连接。
环形二极管接口线路在抗噪声方面发挥重要作用。该线路采用载波发生器和环形二极管线路的差分检测方法进行梳状电容检测。

图2:输出接口线路图,展示用于噪声分析的简化线路配置。

图3:环形二极管检测接口线路,显示信号检测的核心组件。
2
系统建模与驱动技术
陀螺仪系统模型结合理想结构特性和机械热噪声。该模型使用Simulink模拟陀螺仪在各种条件下的行为。
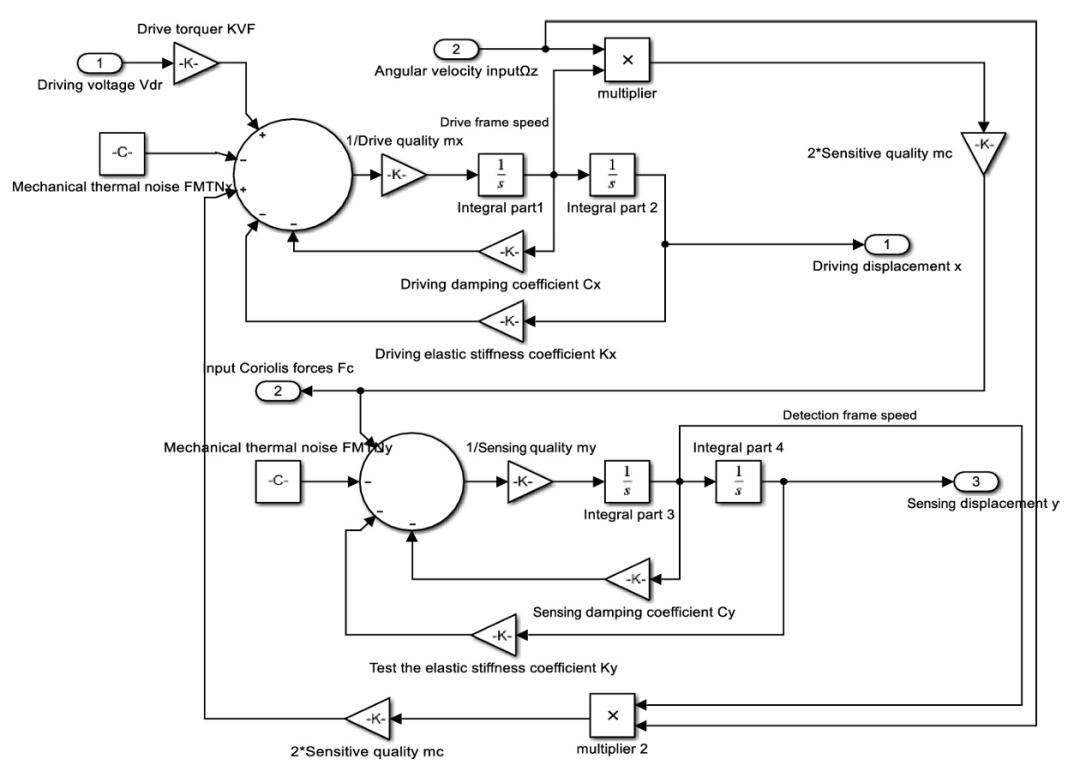
图4:陀螺仪结构等效系统模型,显示驱动模式(深色部分)和检测模式(浅色部分)。
自激励驱动闭环方案确保陀螺仪稳定运行。该系统以陀螺仪结构驱动模式位移作为控制对象,通过滑液梳齿将驱动位移信号转换为电容变化。
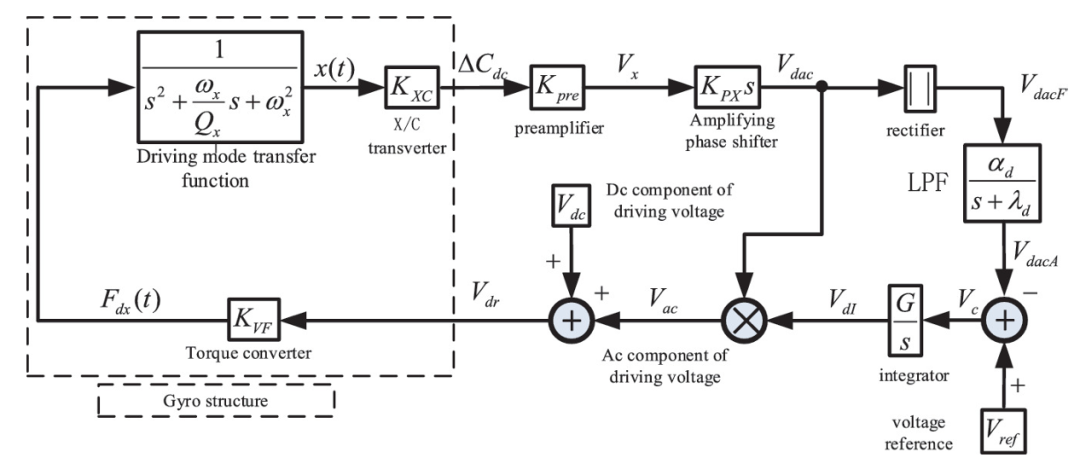
图5:自激励驱动闭环框图,展示完整控制系统架构。
仿真结果证实了驱动系统设计的有效性。通过监测多个参数确保系统正常运行。
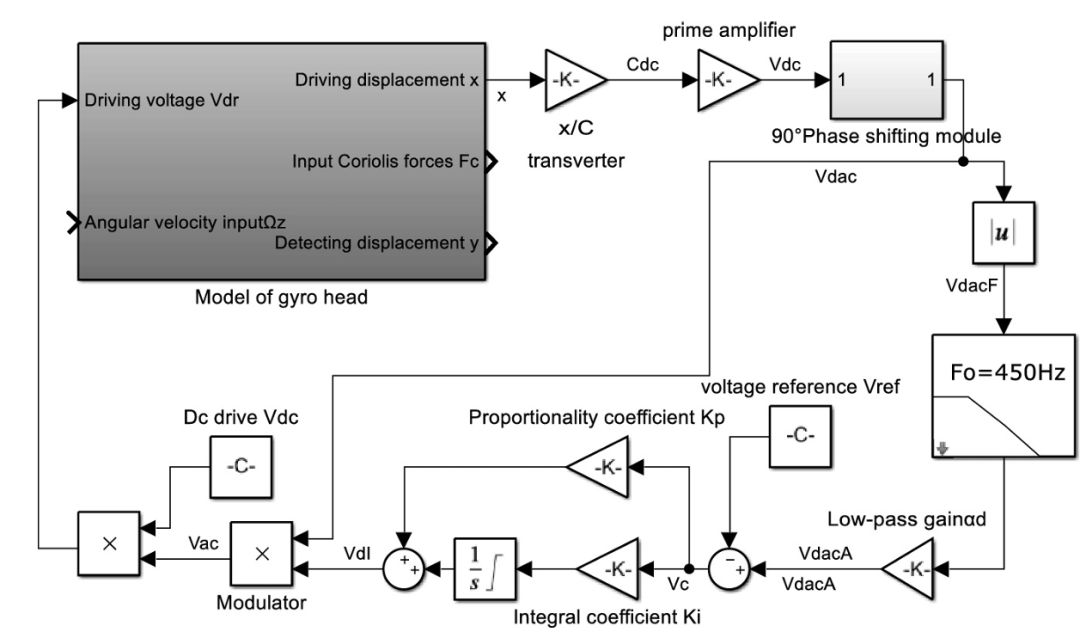
图6:陀螺仪驱动模式自激励闭环驱动仿真框图,说明完整系统实现。
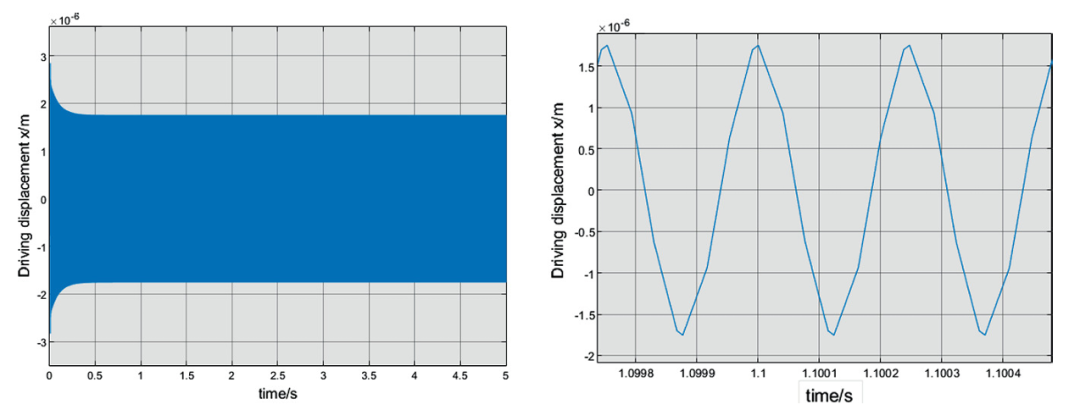
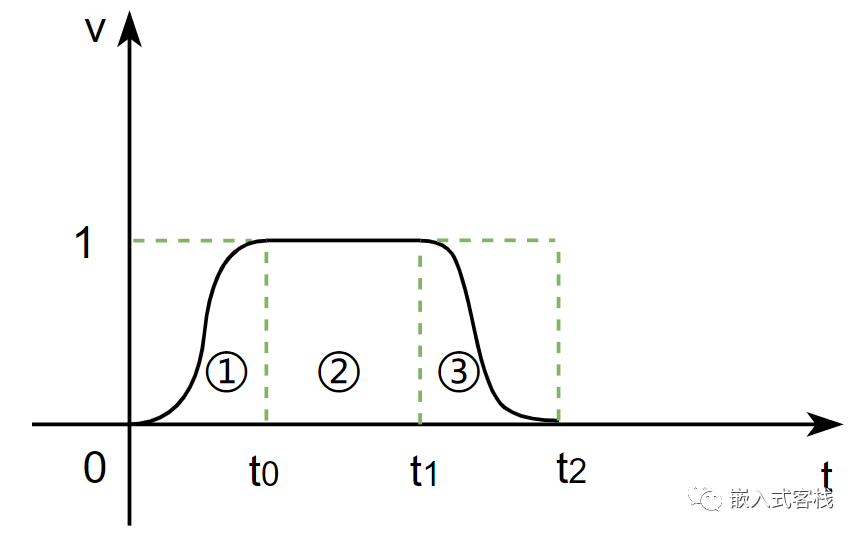
图7:驱动模式自激励闭环中驱动位移x的仿真图(左)和局部放大图(右),展示系统启动过程和稳定状态。
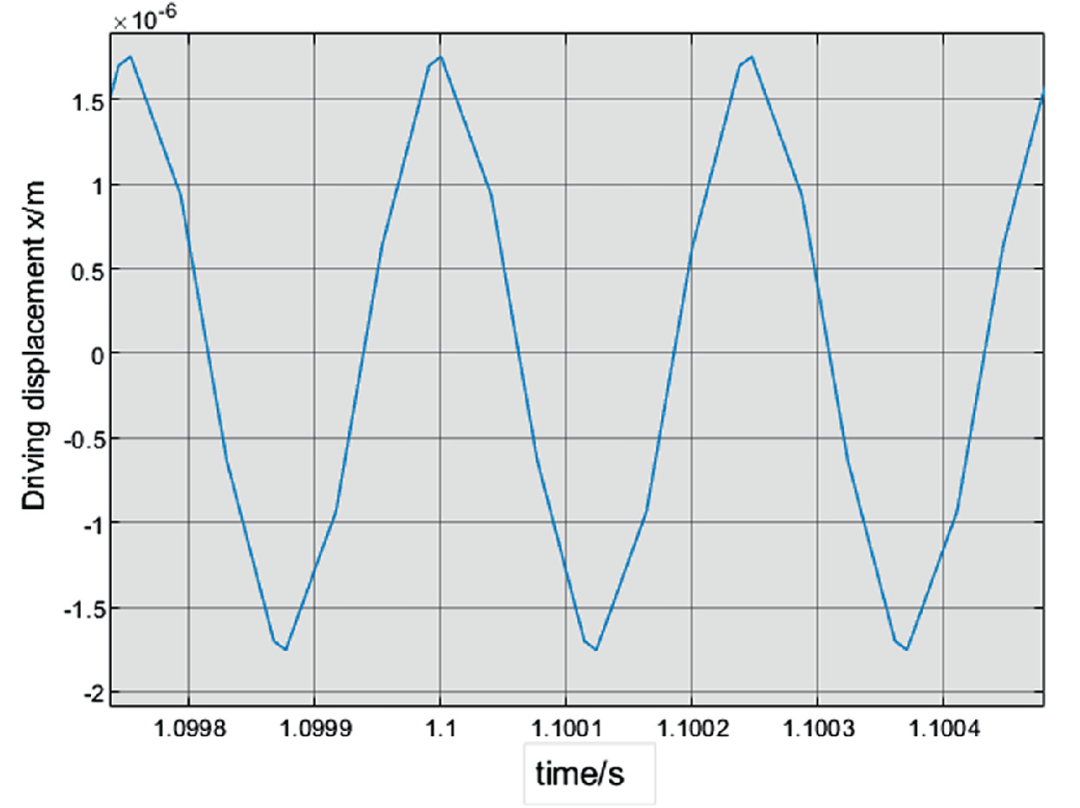
图8:90°相位移位器的输入和输出仿真结果,显示精确的相位移位特性。
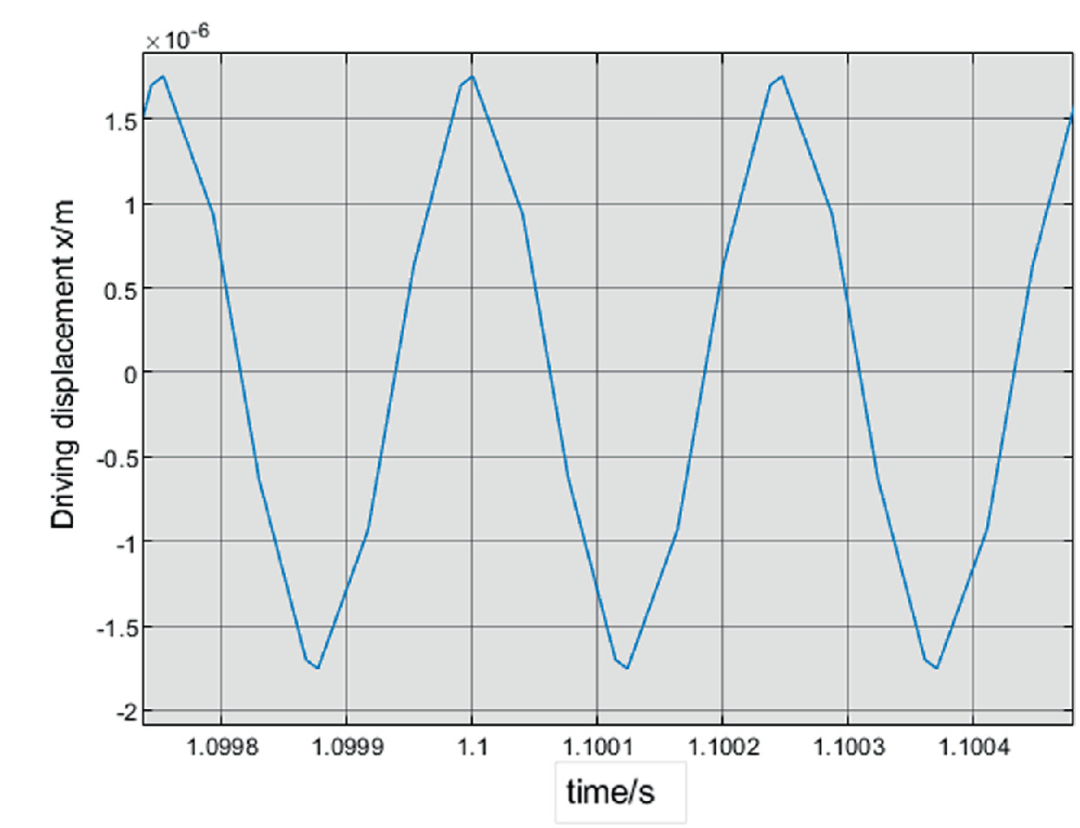
图9:VDACA输出结果仿真,展示与驱动位移测量相关的交流幅值。
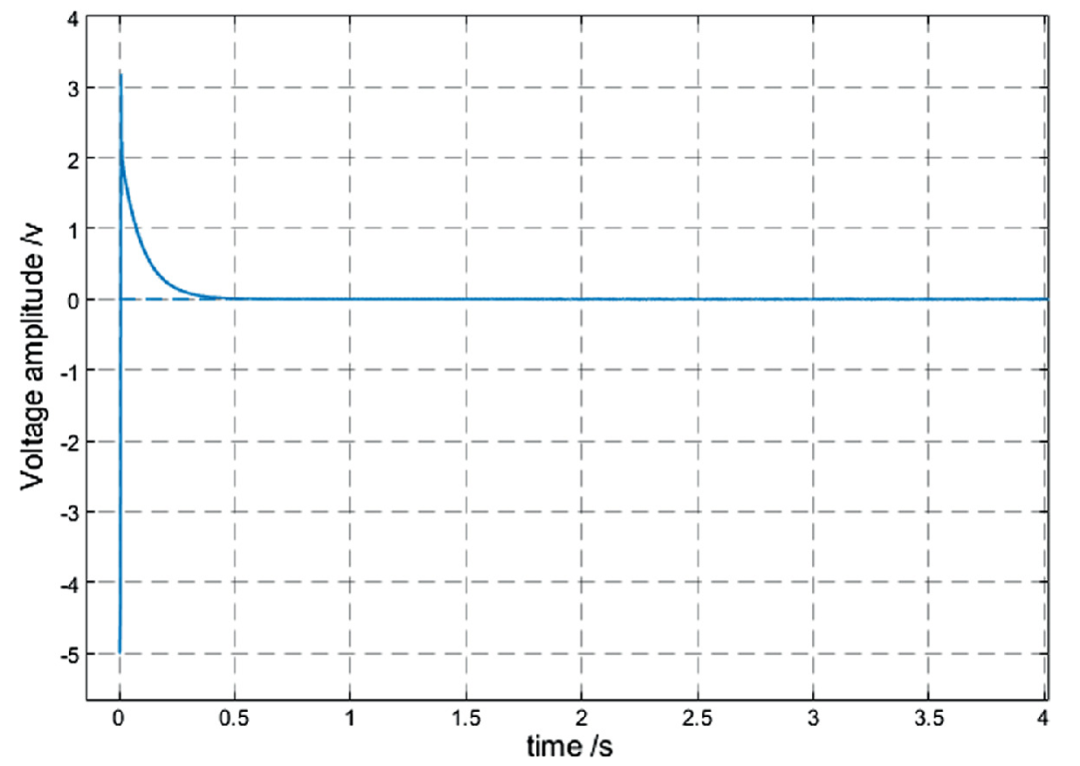
图10:积分器输入Vc的仿真结果,显示参考电压与VDACA的差值。
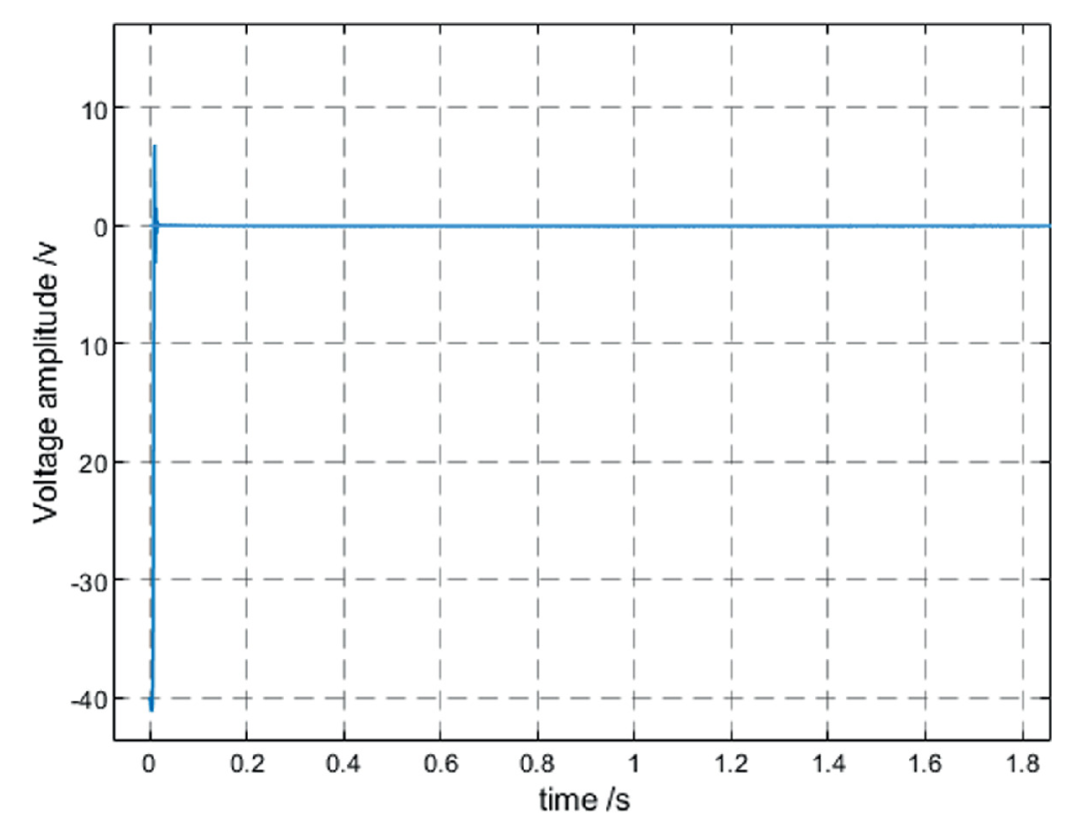
图11:积分器输出VdI的仿真结果,展示系统稳定后的输出特性。
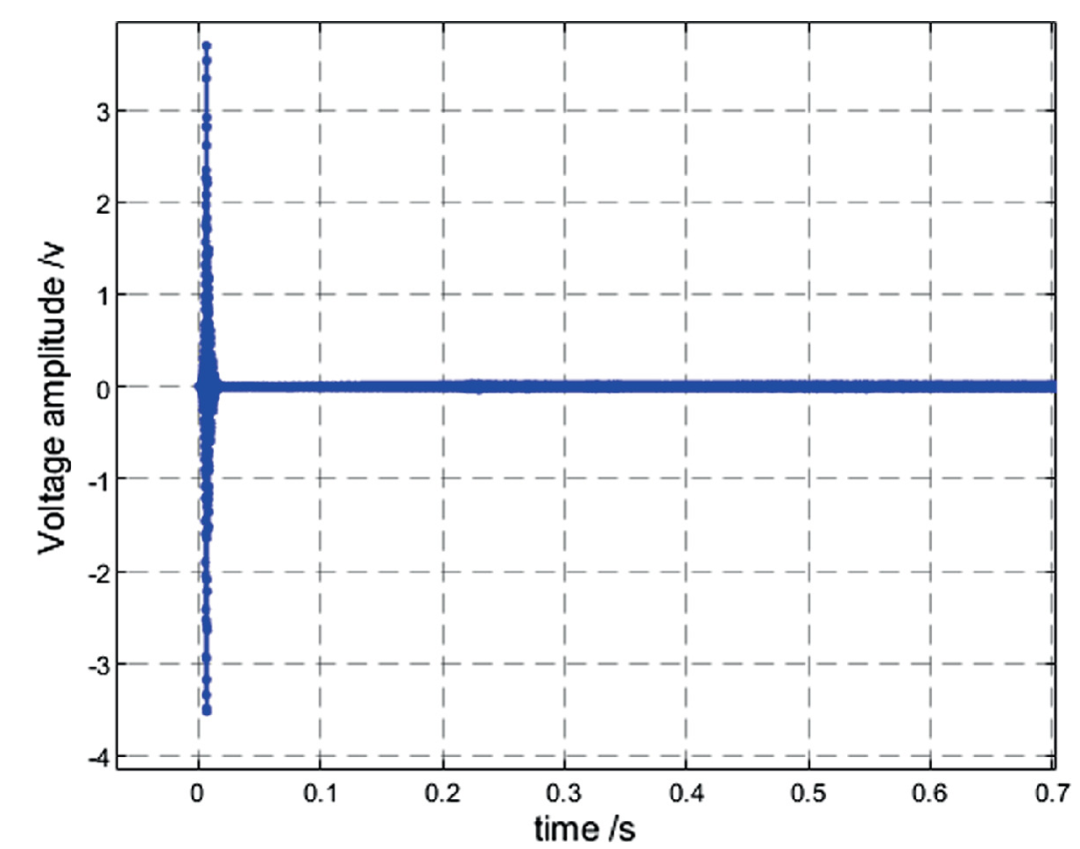
图12:驱动电压交流分量的仿真结果,显示稳定状态下的峰峰值特性。
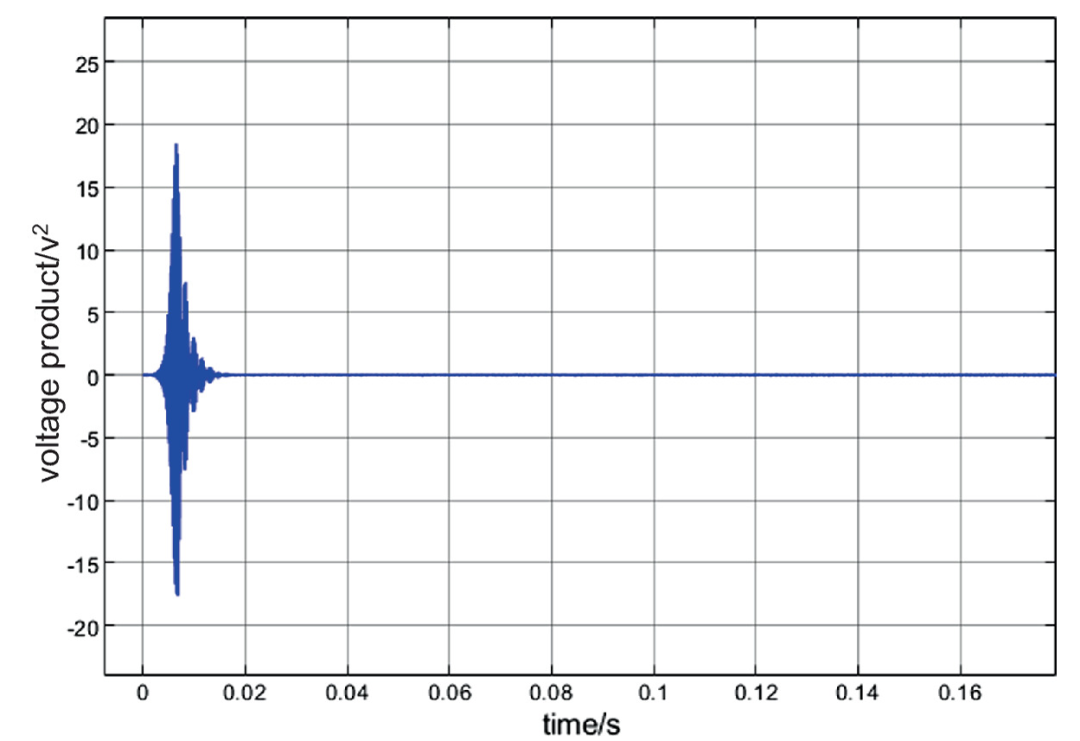
图13:驱动电压交直流乘积的仿真结果,展示系统稳定后的驱动力特性。
3
噪声分析与测试
MEMS陀螺仪结构存在多种噪声,包括机械热噪声、电子热噪声和闪烁噪声。了解这些噪声源对优化性能具有重要意义。
温度测试揭示了驱动环路系统的重要特性。在-40°C至60°C范围内进行的实验证明了系统在宽温度范围内的稳定性。
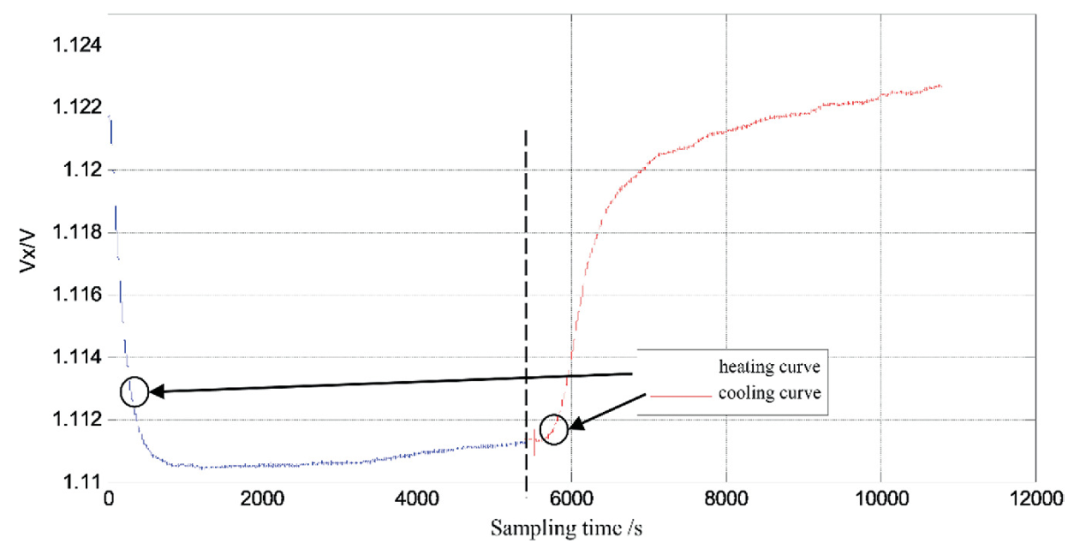
图14:驱动位移全温度实验结果,显示在温度范围内的稳定性。
接口检测测试和噪声分析提供了系统在不同条件下性能的见解。
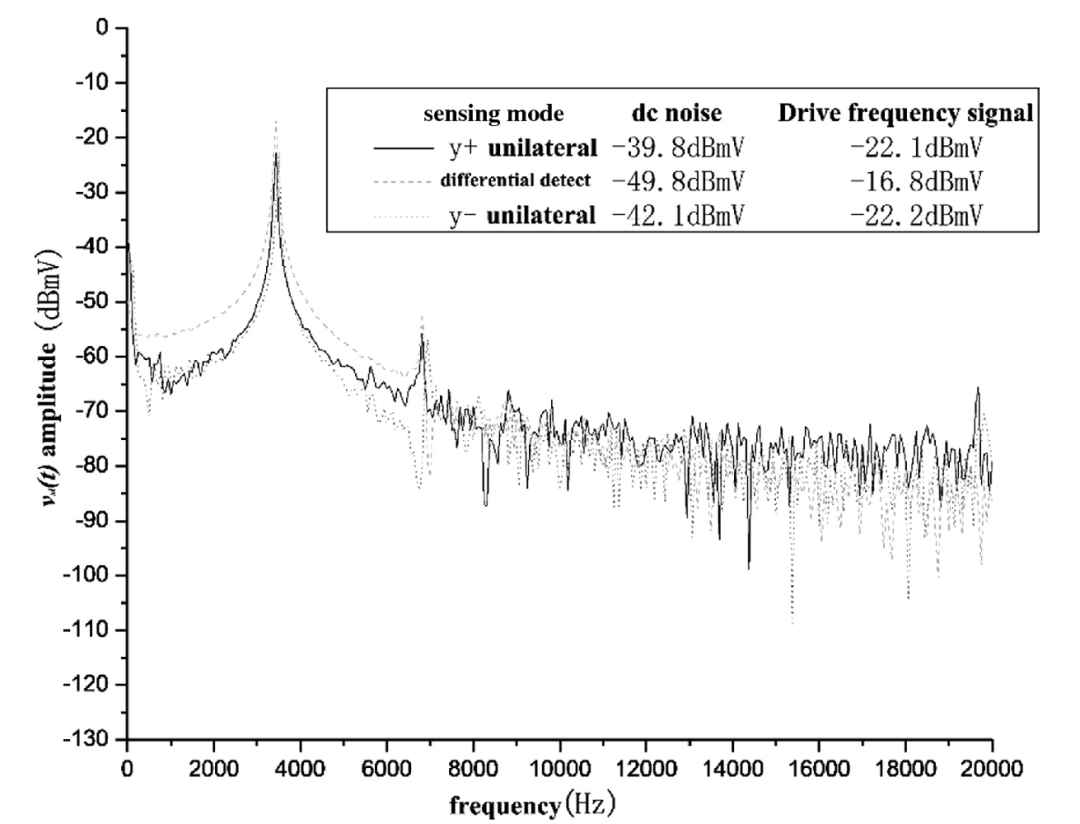
图15:接口检测测试曲线,显示输出信号特性。
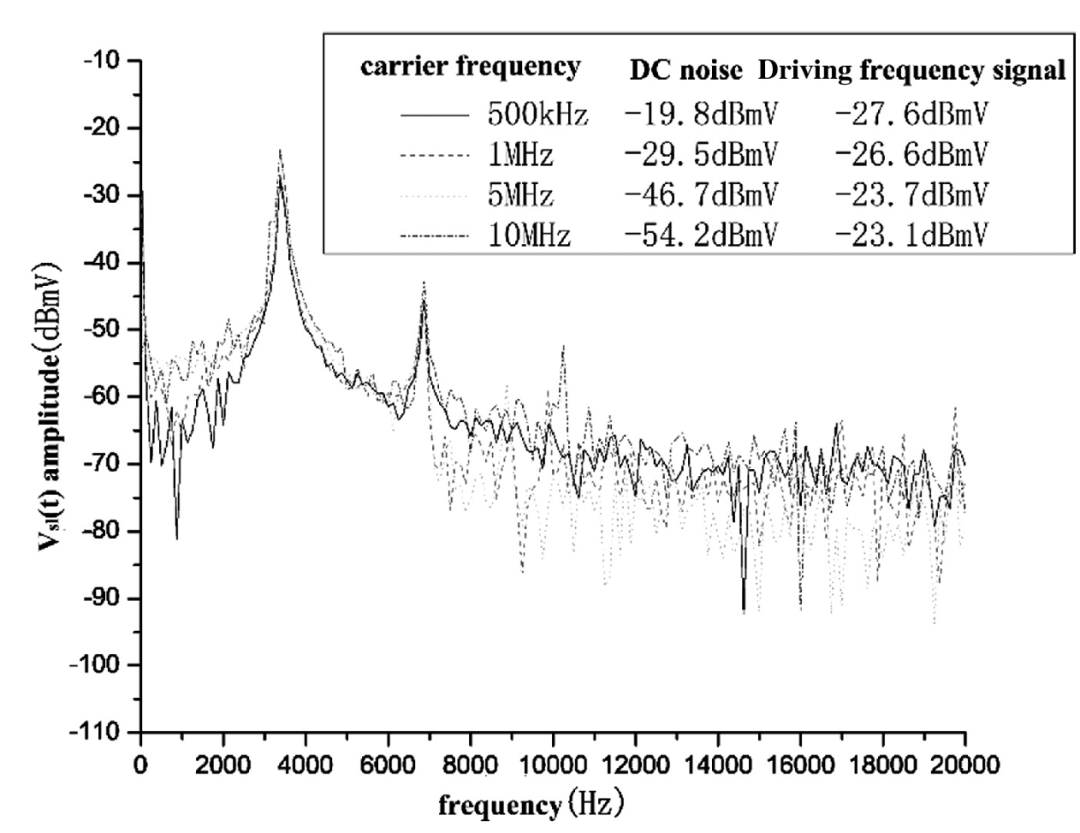
图16:闪烁噪声测试曲线,展示不同载波频率下的噪声行为。
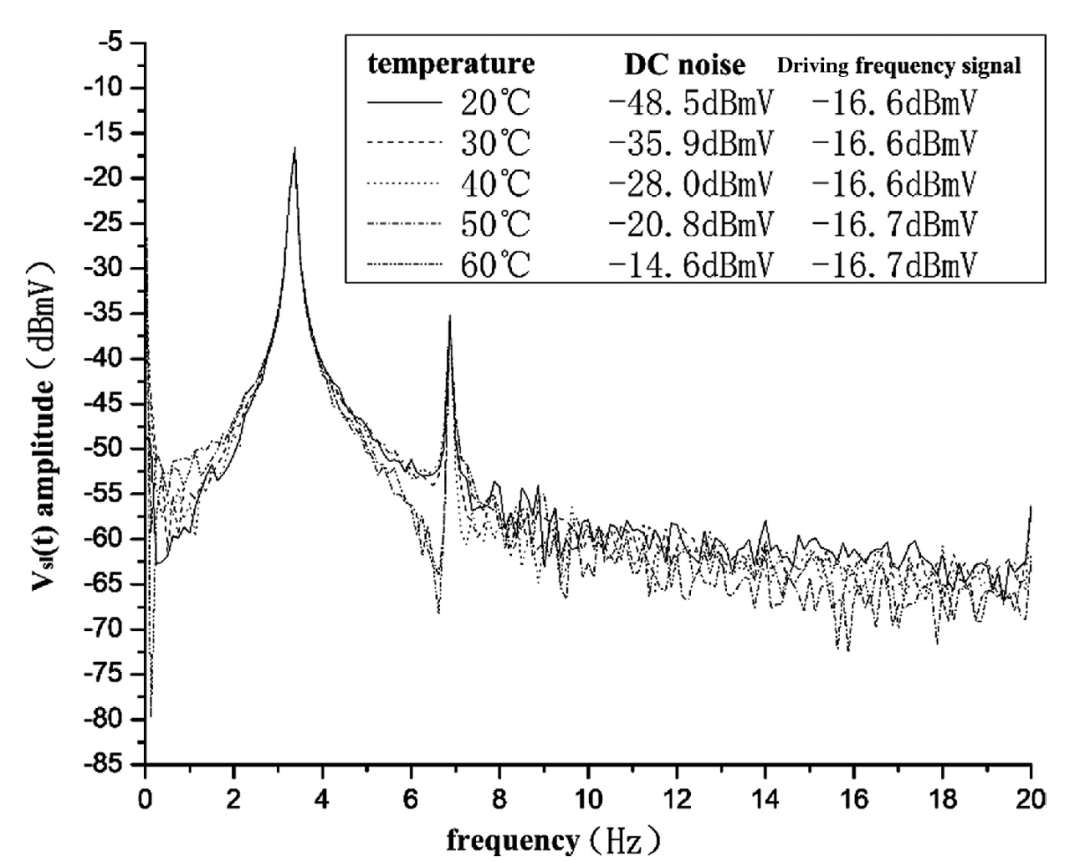
图17:噪声温度测试曲线,说明温度与噪声特性之间的关系。
噪声分析表明,在室温下闪烁噪声占主导地位,随着温度升高,机械和电子热噪声变得更显著。接口线路设计通过差分检测和载波调制技术有效抑制这些噪声源。
通过精心的系统设计和噪声降低策略实现,双质量线性振动硅基MEMS陀螺仪在各种运行条件下实现稳定性能。驱动位移在全温度范围内保持在1.56 μm到1.57 μm之间的一致性,证明了自激励驱动闭环系统的有效性。
复杂的电学建模、先进的接口线路设计和全面的噪声管理使这些MEMS陀螺仪适用于要求在不同环境条件下保持稳定性能的高精度应用。









暂无评论